To pass or not to pass: A field experiment on human values in interactions with automated vehicles
Abstract
Vulnerable road users (VRUs), such as pedestrians and cyclists, are at high risk in road traffic, accounting for more than half of all global traffic fatalities. Ensuring safe interactions with highly automated vehicles (AVs) requires understanding and predicting VRUs' behaviour. This study investigated the relevance and predictive role of human values alongside environmental factors in real-world VRU-AV interactions. In a field experiment using a Wizard-of-Oz paradigm, 28 pedestrians and 29 cyclists interacted with an oncoming vehicle in a space-sharing scenario. Human values were assessed both qualitatively and quantitatively, while distance to the vehicle and driving mode (AV vs. manually driven) were manipulated. Results show that numerous human values (e.g., comprehensibility, legal compliance, self-efficacy, relaxedness) were rated as highly relevant, but only values related to relaxed interaction significantly predicted pedestrians' behaviour. Distance predicted interaction behaviour for VRU groups, whereas driving mode had no effect. Overall, the findings highlight the importance of considering both environmental factors and human values. The study demonstrates that values provide a broader perspective for understanding VRU behaviour and informing the design of safe, trustworthy, and acceptable VRU-AV interactions.
1. Introduction
The deployment of highly automated vehicles (AVs) is often associated with the expectation that they will improve road safety by reducing, or even eliminating, human error (Di Lillo et al., 2024; Deshmukh et al., 2023; Kusano et al., 2024). Human error—including distraction, speeding, or driving under the influence of substances—is still one of the leading causes of serious crashes resulting in injury or death (WHO, 2023). Vulnerable road users (VRUs) like pedestrians and cyclists face a high risk of severe injury and fatality, particularly in collisions with motor vehicles. Current estimates from the World Health Organization indicate that VRUs account for more than half of all global road traffic fatalities (WHO, 2023).
Consequently, research has examined how AVs' behaviour should be designed to ensure safe interaction with VRUs (Deshmukh et al., 2023; Li et al., 2025). A prerequisite for safe AV behaviour is the vehicles' ability to predict VRUs' behaviour. Accordingly, numerous studies have identified both environmental and VRU-related factors that influence VRUs' behaviour in interactions with AVs (for an overview, see Li et al., 2025; Rasouli & Tsotsos, 2019). Environmental factors refer to objectively observable and measurable entities, such as traffic characteristics (e.g., the driving mode of the approaching vehicle) or dynamic factors (e.g., vehicle speed or distance). VRU-related factors, in contrast, include demographic variables (e.g., age) and individual characteristics of the VRU (e.g., prior experiences), as well as subjective perceptions of the situation (e.g., perceived risk; Li et al., 2025; Rasouli & Tsotsos, 2019). VRU-related factors can only be utilized by the AV to a limited extent, as they often cannot be detected by the AV (e.g., prior experiences). However, they are suitable for understanding VRUs' behaviour and for deriving expectations regarding the design of the interaction. Environmental and VRU-related factors have been used to model VRU behaviour and inform the development of AV algorithms that support safe and trustworthy interactions (e.g., Tian et al., 2024; Lau et al., 2024). However, focusing on few factors does not capture the complexity of VRU-AV interactions.
As emphasized in the EU report Ethics of Connected and Automated Vehicles (Bonnefon et al., 2020), and supported by several studies (e.g., Santoni de Sio, 2021; Halama et al., 2025b; Halama et al., 2025a), a broad range of interconnected human values affect VRUs' behaviour in interactions with AVs. For example, Halama et al. (2025b) used the value sensitive design framework (VSD; e.g., Friedman et al., 2008) to evaluate values of VRUs in a space-sharing situation and found that values such as relaxedness, courtesy, and efficiency were relevant for VRUs' behaviour in addition to values directly related to safety in the situation, e.g., integrity, reliability, comprehensibility, self-efficacy. KC et al. (2025) likewise highlighted the relevance of predictability, responsibility, and reliability in their VR study on pedestrian–AV interaction. However, as both studies were conducted in controlled laboratory environments, it remains uncertain whether these values hold the same relevance in real-world settings and whether they can serve as VRU-related factors of VRUs' behaviour in interactions with automated vehicles.
Therefore, the present study investigates the relevance and predictive role of human values as VRU-related factors in VRU-AV interactions. In addition, the environmental factors distance and driving mode are experimentally manipulated to examine whether they predict VRUs' interaction behaviour.
1.1 Vulnerable road users
VRUs are typically defined as those most at risk in traffic, as they lack the protective structures available to vehicle occupants (OECD, 1998). This group includes pedestrians, cyclists, moped riders, and motorcyclists (European Parliament and the Council, 2010; Holländer et al., 2021; Khayesi, 2020). The present study focuses on pedestrians and cyclists as two particularly relevant subgroups.
Both groups share important characteristics. In low-speed or shared-space contexts, they frequently rely on verbal and non-verbal signals to negotiate right-of-way or indicate crossing intentions (Fabricius et al., 2022; Habibovic et al., 2018; Kong et al., 2021; Sucha et al., 2017). They also face a high risk of severe injury in traffic crashes: According to the World Health Organization, pedestrians account for roughly 21% and cyclists for 5% of global road traffic fatalities, with substantial variation across regions (WHO, 2023).
At the same time, pedestrians and cyclists differ in aspects such as travel speed (Pashkevich et al., 2022), spatial requirements for movement (Wang et al., 2023), response capabilities (Harkin et al., 2024; Stanciu et al., 2018), and the legal frameworks regulating their behaviour (Bundesministerium für Verkehr, Bau und Stadtentwicklung, 2025). Therefore, their interactions with AVs are examined separately in this study.
1.2 Automated vehicles
Automated driving is classified into six levels (SAE International, 2021), from level 0, with no driving automation, to level 5, representing full driving automation. Automation increases progressively across these levels. At levels 4 and 5, drivers are no longer required to remain continuously ready to take control. Level 4 vehicles operate autonomously within defined operational design domains, such as highways under favourable conditions, while level 5 vehicles function fully autonomously in all traffic and environmental contexts. In these higher levels, drivers become passengers, at least within level 4's operational domain. Consequently, interaction partners, including VRUs, must engage with these vehicles, for instance when negotiating right-of-way (Rasouli et al., 2018; Stange et al., 2022). To predict VRUs' behaviour, facilitate safe VRU-AV interactions, and inform the design of such encounters, previous research has primarily focused on identifying predictors of VRUs' interaction behaviour.
1.3 Interaction behaviour of VRUs
Numerous studies have examined the interaction behaviour of pedestrians and cyclists with AVs. This behaviour has been studied in different settings, including real-world field studies, simulator-based methods, survey-based methods, and Wizard-of-Oz experiments (Li et al., 2025). In the latter, vehicles are in fact driven by human drivers who remain unrecognizable to the interaction partner, for example by wearing a seat suit (Hensch et al., 2019) or by concealing the driver with seat covers, a helmet and gloves, so that the driver is no longer visible from the outside (Harkin et al., 2025).
Also, a wide range of measures were used to capture VRUs' interaction behaviour at various stages of an interaction (Li et al., 2025). Examples include VRUs' waiting time (Feng et al., 2024), crossing decision (e.g., Harkin et al., 2025; Watanabe et al., 2023), surrogate safety measures (Song et al., 2023), and crossing performance (e.g., Harkin et al., 2025; Wang et al., 2022).
Most of these studies measured VRU-AV interaction behaviour and identified potential predictors of that behaviour. Li et al., (2025) conducted a review of studies examining predictors of VRUs' behaviour in interactions of pedestrians and cyclists with AVs. The authors grouped the predictors into environmental factors (e.g., AVs' approaching speed, trajectory of driving), psychological variables, individual characteristics, behavioural measures, and neurophysiological data. Similarly, Rasouli and Tsotsos (2019) classified predictors as either environmental or VRU-related factors. Both reviews highlight the importance of considering both factors in VRU-AV interactions.
1.3.1 Environmental factors
Environmental factors affecting VRUs' interactions with AVs include the physical context (e.g., road layout, location), dynamic factors (e.g., vehicle speed, vehicle distance), and traffic characteristics (e.g., automated or manual vehicle, vehicle size; Rasouli & Tsotsos, 2019; Li et al., 2025).
Many studies investigated the influence of dynamic factors such as time-to-collision (TTC) or vehicle–VRU distance on interaction behaviour in VRU-AV interactions. Findings suggest that participants prefer to choose larger spatial or temporal traffic gaps (e.g., higher distance or TTC) when making road-crossing decisions (Nuñez Velasco et al., 2019; Tian et al., 2023). In contrast, Hulse (2023) reported that the majority of participants accepted an objectively unsafe gap when crossing in front of an AV, whereas Rezwana et al. (2025) observed that participants took longer to accept a gap in scenarios involving driverless vehicles, suggesting a more cautious crossing approach.
Furthermore, several studies have examined whether VRUs' interaction behaviour differs depending on whether the interaction partner is an AV or manually driven vehicle (MV). Some studies report differences for pedestrians (e.g., Dommes et al., 2021; Taima & Daimon, 2023) and cyclists (e.g., Harkin et al., 2025; Vlakveld et al., 2020), whereas others did not find significant effects of driving mode (e.g., Dey et al., 2019; Nuñez Velasco et al., 2019; Rodríguez Palmeiro et al., 2018). Halama et al. (2025b) offer a potential explanation for these mixed results. In their video-based laboratory study, these authors found only a small effect of driving mode at the first level of a linear mixed model (LMM), which explained about 5% of the variance in the behavioural data, with participants being slightly more likely to wait in front of the AV compared to the MV. Including interindividual differences (random intercepts for pedestrians in the LMM) substantially increased the explained variance—up to more than 80% for pedestrians and 42% for cyclists—suggesting that much of the variance in behavioural intention can be attributed to interindividual differences. Razmi Rad et al. (2020) found similar results in their laboratory study on pedestrians' road-crossing behaviour in a virtual environment. Their generalized linear mixed model (GLMM) analysis revealed significant effects of TTC and driving mode, as well as a significant random intercept for participants, highlighting the relevance of interindividual differences in pedestrian crossing behaviour.
Overall, research on environmental factors often focuses on specific aspects, and findings—for example, on dynamic factors and driving mode—are partly inconsistent. Furthermore, most of the studies presented examined scenarios in which VRUs crossed the road in front of a vehicle. Moreover, many studies are video-based or simulator experiments that do not capture VRUs' interaction behaviour in real-world settings. In addition, accounting for interindividual differences substantially improves the explanation of VRUs' behaviour. Therefore, a broad consideration of VRU-related factors is essential to better understand and predict VRUs' behaviour in interactions with automated vehicles.
1.3.2 VRU-related factors
VRU-related factors that influence VRUs' behaviour in interactions with AVs include variables describing a person's current state (e.g., attention, perceived risk), demographics (e.g., age, gender), social factors (e.g., perceived social norms), and individual characteristics (e.g., culture, prior experience; Li et al., 2025; Rasouli & Tsotsos, 2019). Similar to research on environmental factors, studies on VRU-related factors often focus on specific, isolated constructs. For instance, psychological variables such as perceived risk (Hulse, 2023), safety (Lau et al., 2024), perceived criticality (Halama et al., 2025b), trust (Hoff & Bashir, 2015; Li et al., 2025), and transparency (Bindschädel et al., 2023; Vlakveld et al., 2020) have been investigated as predictors of VRUs' behaviour.
However, the broader literature on human values in human–technology interaction, particularly within the framework of value-sensitive design (e.g., Friedman et al., 2008; Friedman & Hendry, 2019), suggests that a more comprehensive perspective may be relevant for VRU-AV interactions. For example, values such as comprehensibility, efficiency, calmness, self-efficacy, privacy, justice, explainability, transparency, predictability, and equality (Bonnefon et al., 2020; Gerdes et al., 2019; KC et al., 2025; Santoni de Sio, 2021; Halama et al., 2025a) have been identified as relevant for VRUs in this context. However, these studies are either purely theoretical, selectively focus on specific values, or address VRU-AV interactions only in a general sense rather than in concrete scenarios.
In contrast, in a laboratory study by Halama et al., (2025b), the relevance and predictive role of human values were examined in a space-sharing scenario. Participants imagined themselves as pedestrians or cyclists and interacted in multiple trials with either an AV or an MV, reporting both their behavioural intentions and the relevance of human values. Human values were quantitatively assessed by having participants rate 21 values on a Likert scale. In addition, qualitative statements in which participants explained their behavioural intentions were assigned to corresponding values. This procedure provided further insights into the relevance of specific values and served to complement and validate the quantitative measurements. Results showed that numerous values were rated quantitatively and qualitatively as highly relevant for the scenario (e.g., comprehensibility, integrity, reliability, trust, self-efficacy, and relaxedness). However, as the study was conducted in a laboratory, it remains unclear whether these findings generalize to real-world interactions. Moreover, although values were rated as highly relevant, they did not predict behavioural intention, potentially due to the artificial nature of the study. Therefore, the present study addresses similar research objectives but implements a Wizard-of-Oz field experiment to examine human values as VRU-related factors in real-world VRU-AV interactions.
1.4 Research objectives and hypotheses
In summary, research on VRU-AV interactions has largely focused on specific predictors of VRUs' behaviour, including environmental factors and VRU-related factors. Human values can be interpreted as VRU-related factors that may provide a more integrative perspective, yet their relevance and predictive role in real-world interactions remain unclear.
Building on this, the present study addresses three research objectives by jointly considering human values and environmental variables in a real-world space-sharing scenario.
The first objective concerns the relevance of human values for VRUs' interaction behaviour. To examine this, the following hypotheses were formulated:
-
H1a. Human values differ in their relevance within a space-sharing scenario.
-
H1b. Human values differ in their relevance within driving modes.
The second objective focuses on the predictive role of human values as VRU-related factors:
-
H2. Human values predict VRUs' interaction behaviour significantly.
The third objective addresses the influence of the environmental factors distance and driving mode on VRUs' interaction behaviour. Accordingly, two hypotheses were derived:
-
H3a. The distance between the VRU and the approaching vehicle predicts VRUs' interaction behaviour. With increasing distance to the narrow passage, the proportion of VRUs who choose to wait increases.
-
H3b. Driving mode predicts VRUs' interaction behaviour. The proportion of VRUs who choose to wait is higher in interactions with an automated than with a manual vehicle.
2. Method
To address the research objectives, a Wizard-of-Oz experiment was conducted to examine the effects of environmental (distance and driving mode) and VRU-related (relevance of human values) variables on VRUs' interaction behaviour. Participants took part in the experiment either as pedestrians or cyclists and interacted within a space-sharing scenario (replicating the scenario described in Halama et al., 2025b) with either a manually driven vehicle or a vehicle presented as automated.
2.1 Participants
A total of 61 individuals participated in the study. Sampling was carried out via email distribution lists of Chemnitz University of Technology and through flyers. Fifty-seven participants were psychology or cognitive science students who received mandatory course credit for participation. The remaining four participants were employed outside the university or retired and took part voluntarily without compensation.
In the pedestrian condition, 32 participants were assigned. Two participants were excluded from analyses because they did not believe that one of the experimental vehicles was automated. Two additional participants were excluded because of technical errors (one participant) and because they intentionally altered their behaviour to conform to perceived expectations (i.e. to act as a “good participant”, one participant). The final pedestrian sample consisted of N = 28 participants, ranging in age from 18 to 34 years (M = 21.79, SD = 3.77). The majority of the participants identified as female (86%), 14% as male. In addition, 71% reported to hold a valid driver's license.
The other half of the participants (N = 29) were assigned to the cyclist condition. Participants in this group ranged in age from 18 to 70 years (M = 24.14, SD = 10.51). They mainly identified as female (76%), 21% male, and 3% as non-binary. In this condition, 97% reported holding a driver's license.
2.2 Material
The study included an initial survey, materials for the experimental setup, and a final survey. Both surveys were created with Limesurvey and presented to participants on a tablet PC. The initial survey assessed the participants' informed consent, demographic information (age, gender, driver's license ownership), and gave instructions regarding the study's procedure. The final survey assessed the participants' relevance ratings of human values.
The relevance ratings of human values, as VRU-related factors, were assessed with 21 items from Halama et al. (2025b), covering integrity, comprehensibility, reliability, equality, privacy, trust, courtesy, usability, freedom, self-efficacy, legal compliance, resource efficiency, relaxedness, accountability, autonomy, calmness, environmental sustainability, freedom from bias, identity, ownership and property, and informed consent. Participants rated the importance of each value for interactions with an automated and a manual vehicle on a 7-point Likert scale (1 = “not important at all”, 7 = “very important”). The order of the value assessment for the interactions with the automated and the manual vehicles, as well as the sequence of values within each vehicle mode, was counterbalanced across participants using a Latin square design.
The experimental setup consisted of four vehicles, a camera and, for the cycling condition, a bicycle and, a helmet. The same bicycle was used for all participants to avoid confounding effects of bicycle type.
Two vehicles (BMW and Dacia) were always parked in the same position to create a narrow passage (see Figures 1 and 2). The other two vehicles (Smart) were nearly identical and represented either the MV or the AV (independent variable 1: driving mode). The windows of the purported AV, which was in fact manually driven, were covered with one-way mirror film (Figure 2). This allowed the driver to see outside, while the vehicle's interior and the driver remained invisible from the outside (Wizard-of-Oz paradigm). Participants were informed that, due to ethics committee requirements, a person had to remain inside the vehicle, although an intervention would not be required because the vehicle was fully automated for the given track. This manipulation corresponded to level 4 automation (SAE International, 2021). The mirror film was explained to the participants as a measure to prevent communication with the driver, which had occurred frequently in practice trials of the study.
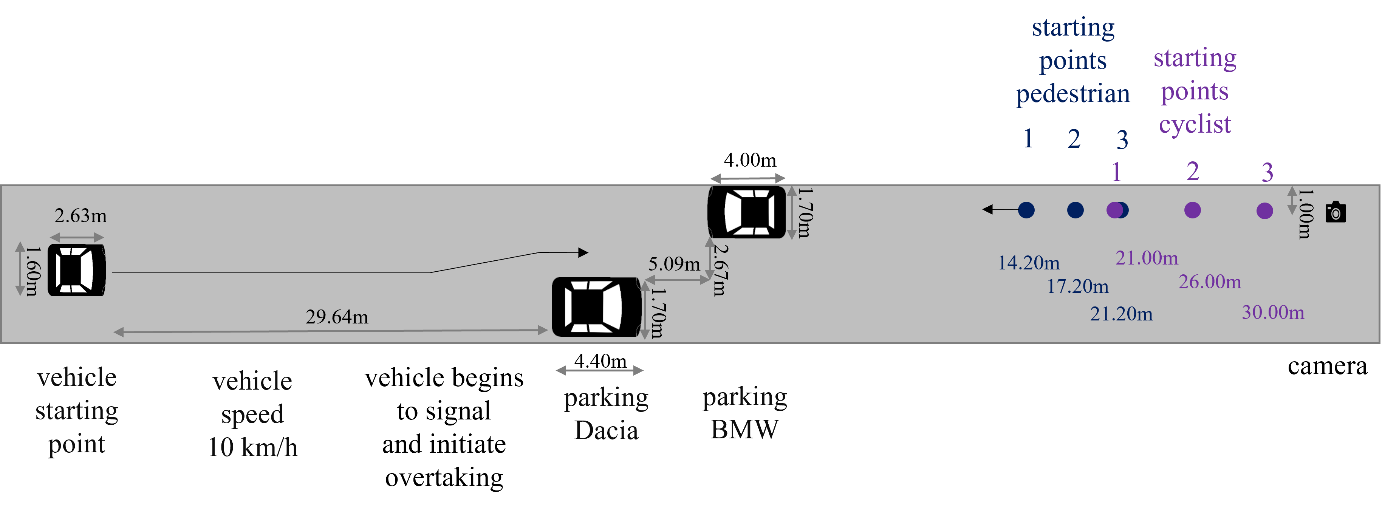
Since environmental variables such as TTC and vehicle distance were expected to influence VRUs' interaction behaviour, relevant TTC values were derived from the literature to design scenarios likely to elicit differences in interaction behaviour. However, practice trials revealed that fully standardizing walking and cycling speeds was not feasible. Therefore, three starting points were defined separately for pedestrians and cyclists (see Figure 1; independent variable 2: distance). The starting points were determined based on average VRUs' speeds and refined through pilot testing with participants of different natural walking / cycling speeds.

During the trials, a camera on a tripod that was positioned behind the participants recorded their behaviour (to pass or not to pass). After each trial, participants completed a brief interview in which they were asked “You decided to wait / proceed. Why did you make this decision?”. The responses were used during the qualitative content analysis to assign participants' statements to human values. Mapping the participants' explanations to their relevance ratings of values validates the quantitative ratings of the participants.
The experimenters received a list of experimental conditions, a checklist for setting up, conducting, and dismantling the study, as well as an instruction sheet containing standardized verbal instructions (e.g., about the procedure and vehicle automation). At the end of the study, the experimenters handed out a debriefing sheet to the participants clarifying that the vehicle was not automated, and experimenters noted whether participants had believed the manipulation.
2.3 Procedure
Prior to the field study, pilot tests were conducted to determine the starting points, train experimenters, and familiarize drivers with the procedure. Drivers were instructed to stop if any situation posed a potential risk. The study design and scenario were approved by the Ethics Committee of Chemnitz University of Technology (#101605759).
Participants were informed in advance that they would interact with an automated and a manual vehicle as pedestrians or cyclists. At the beginning of the study, they completed the baseline survey, including informed consent and instructions for the experimental procedure, followed by a verbal summary of the study. In the cycling condition, the bicycle saddle and helmet were individually adjusted, and participants completed a practice ride until they felt comfortable.
During the experiment, participants started from one of the three starting points to complete six trials, navigating through the narrow passage. They were informed in advance about the driving mode and starting point (distance).
After each trial, the participants justified their decisions. Upon completing all trials, the participants filled out the post-experiment survey and were debriefed. Finally, the participants stated whether they had believed the vehicle was automated or not.
Two experimenters were present throughout the study. Experimenter 1 communicated with participants, and Experimenter 2 drove the vehicle. Each session lasted up to 90 minutes, including preparation and debriefing.
2.4 Experimental design
In the present field study, type of VRU (pedestrians or cyclists, between-subjects) and driving mode (automated or manual, within-subjects) were manipulated. The distance between participants and the approaching vehicle was manipulated as well. For that, participants started from three predefined starting points (pedestrians: 1 = 14.20 m, 2 = 17.20 m, 3 = 20.20 m; cyclists: 1 = 21.00 m, 2 = 26.00 m, 3 = 31.00 m, within-subjects). The sequence of the resulting six trials (2 driving mode x 3 starting point) was counterbalanced across participants using a Latin square design to minimize carry-over effects.
Dependent variables included the participants' interaction behaviour (decision to wait or to go first through the narrow passage), their verbal explanations for their decision, and the quantitative ratings for their values.
To minimize the influence of potentially confounding variables (Zhu et al., 2025), the study was conducted in good weather conditions and the test track was consistently covered by shade. Because ambient temperatures varied considerably between test days, daily average temperature was included as a confounding variable in the analysis of VRUs' interaction behaviour.
2.5 Data analysis
Manipulation check. A manipulation check was conducted to verify whether participants believed they were interacting with an automated vehicle. For that, the data of the participants who were uncertain were checked for systematic differences compared to data from participants who believed the manipulation. Specifically, it was examined whether participants' value ratings differed systematically, whether distinct behavioural patterns emerged (e.g., consistently choosing to pass first in all automated conditions), and whether the recorded videos indicated any noticeable deviations in their interaction behaviour.
Outlier treatment. The dataset was screened for outliers before the statistical analyses. Values that deviated more than ±3 standard deviations from the respective group mean were considered to be outliers. These outliers were replaced with the group mean plus or minus 3 standard deviations, depending on the direction of the deviation. In total, five relevance ratings of values were replaced. Among pedestrians, three ratings were adjusted (one freedom, two integrity). Among cyclists, two ratings were adjusted (one trust, one rule compliance). Of the five adjustments, two occurred in conditions involving automated vehicles, and three in conditions involving manually driven vehicles.
H1: Relevance of values. To examine whether human values differ in their relevance within the scenario (H1a) and across driving modes (H1b), the quantitatively assessed relevance ratings were used. Differences in mean ratings were considered meaningful when the 95% confidence intervals did not overlap, which avoids excessive significance testing.
To complement and validate the quantitative relevance ratings of the human values, participants' explanations of their interaction behaviour (waiting or passing first) were analysed using qualitative content analysis (Mayring & Frenzl, 2022) in MAXQDA (version 25). The statements were assigned to predefined human value categories based on the coding system developed by Halama et al. (2025b), in which the assignment categories represent the human values themselves. Each value is conceptually defined and illustrated with anchor examples to guide the coding process.
The initial coding scheme included the values comprehensibility, predictability, integrity, reliability, trust, self-efficacy, relaxedness, legal compliance, efficiency, courtesy, communication, and equality. For most statements, an assignment to the existing categories was possible. However, minor adaptations of the category system became necessary during the analysis. The value equality was removed, as no statements could be assigned to this category. Furthermore, comprehensibility and predictability were merged into a single category, as participants' retrospective explanations did not allow for a clear distinction between the two values. An overview of the final value definitions and anchor examples used in the qualitative content analysis is provided in Appendix A.
After iterative refinement of the coding scheme, two independent coders analysed the full dataset. Due to technical recording issues, no verbal explanations were available for four pedestrians and three cyclists. The remaining explanations were often multifaceted and referred to more than one human value. Therefore, the material was segmented into distinct units of meaning as part of the qualitative content analysis. This segmentation resulted in 450 units of meaning (204 from pedestrians and 246 from cyclists). The vast majority of these units (96%) could be assigned to one of the human value categories. Eighteen statements could not be classified: eight contained no substantive reasoning, five participants indicated that they had changed their decision to pass or not to pass during the trial, two stated that they could not explain their decision, another two reported that they had already decided before the interaction, and one participant noted that the automated vehicle had made the decision for them by proceeding first.
Interrater agreement was 72%. Discrepancies were resolved through discussion until consensus was reached. Such discrepancies are typical in qualitative content analysis, as participants' statements may be ambiguous or reflect multiple underlying values, allowing for different but theoretically plausible coding decisions.
H2: Predictive role of values on interaction behaviour. To test H2, generalized linear mixed models (GLMMs) were conducted. Given the large number of 21 values, it was first examined whether the values could be grouped into underlying components to reduce the number of fixed effects. Following previous studies (e.g., Razmi Rad et al., 2020), principal component analyses (PCA) were performed on the quantitative value relevance ratings. As a prerequisite for PCA, it was verified that each of the 21 values correlated with at least one other value at r ≥ .30 (Tabachnick & Fidell, 2013).
The PCA was conducted iteratively, testing different extraction methods (Eigenvalue > 1 and scree plot). Values with loadings r < .30 on the resulting components, as well as values showing only moderate cross-loadings (r ≈ .40) across three components, were excluded from further analysis. As values did not differ across driving modes, mean scores were calculated for the components and included as fixed effects in the GLMM.
H3: Predictive role of distance and driving mode on interaction behaviour. Driving mode and distance were also entered as fixed effects in the first level of the GLMM.
In addition, average daily temperature was included to control for potential confounding effects (Zhu et al., 2025). To account for interindividual differences, a random intercept for participants was included in the model.
3. Results
3.1 Manipulation check
Figure 3 presents the results of the manipulation check.
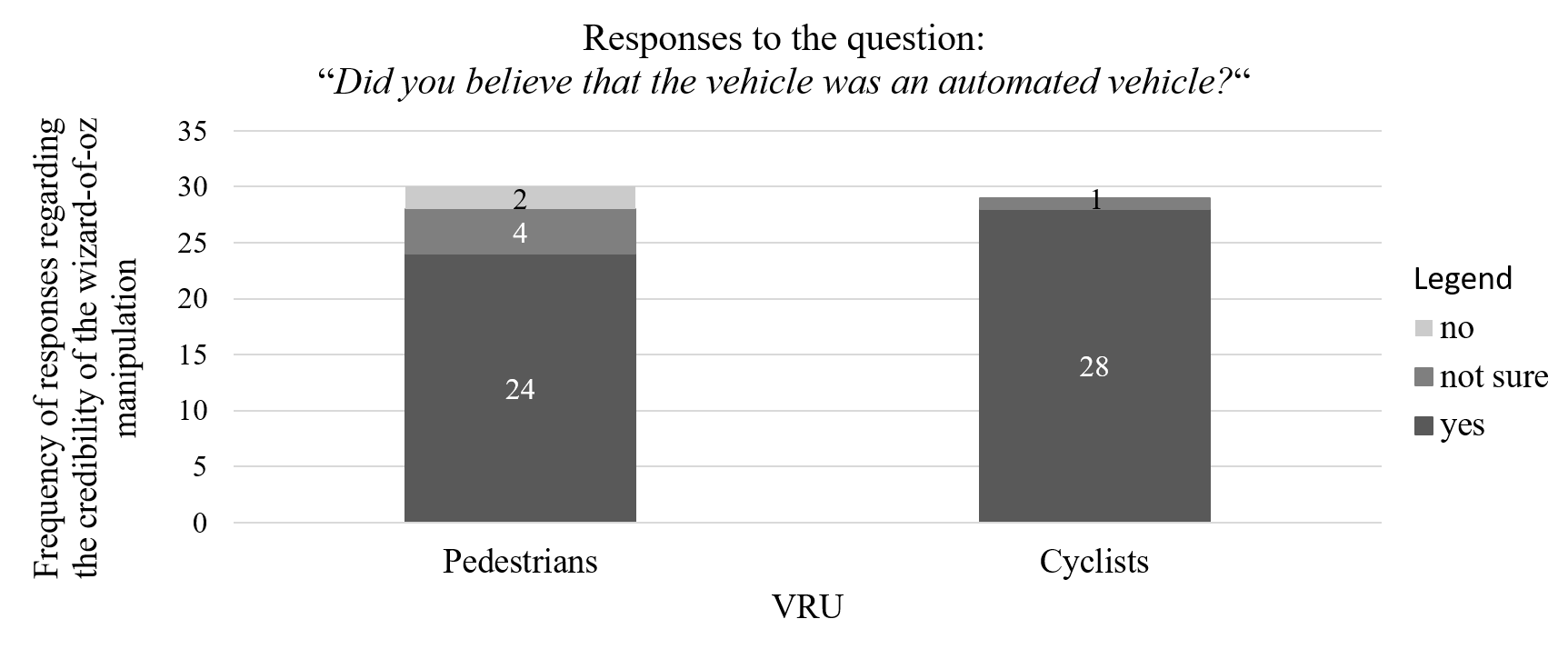
Most participants believed that they were interacting with an automated vehicle. Participants who were not sure whether the vehicle was automated did not show any systematic differences in their data and were therefore retained in the analyses. The two pedestrians who did not believe the manipulation were excluded from the subsequent analyses.
3.2 Quantitative relevance ratings of values in the space-sharing scenario (H1)
Figure 4 presents the quantitatively assessed relevance ratings of the human values.
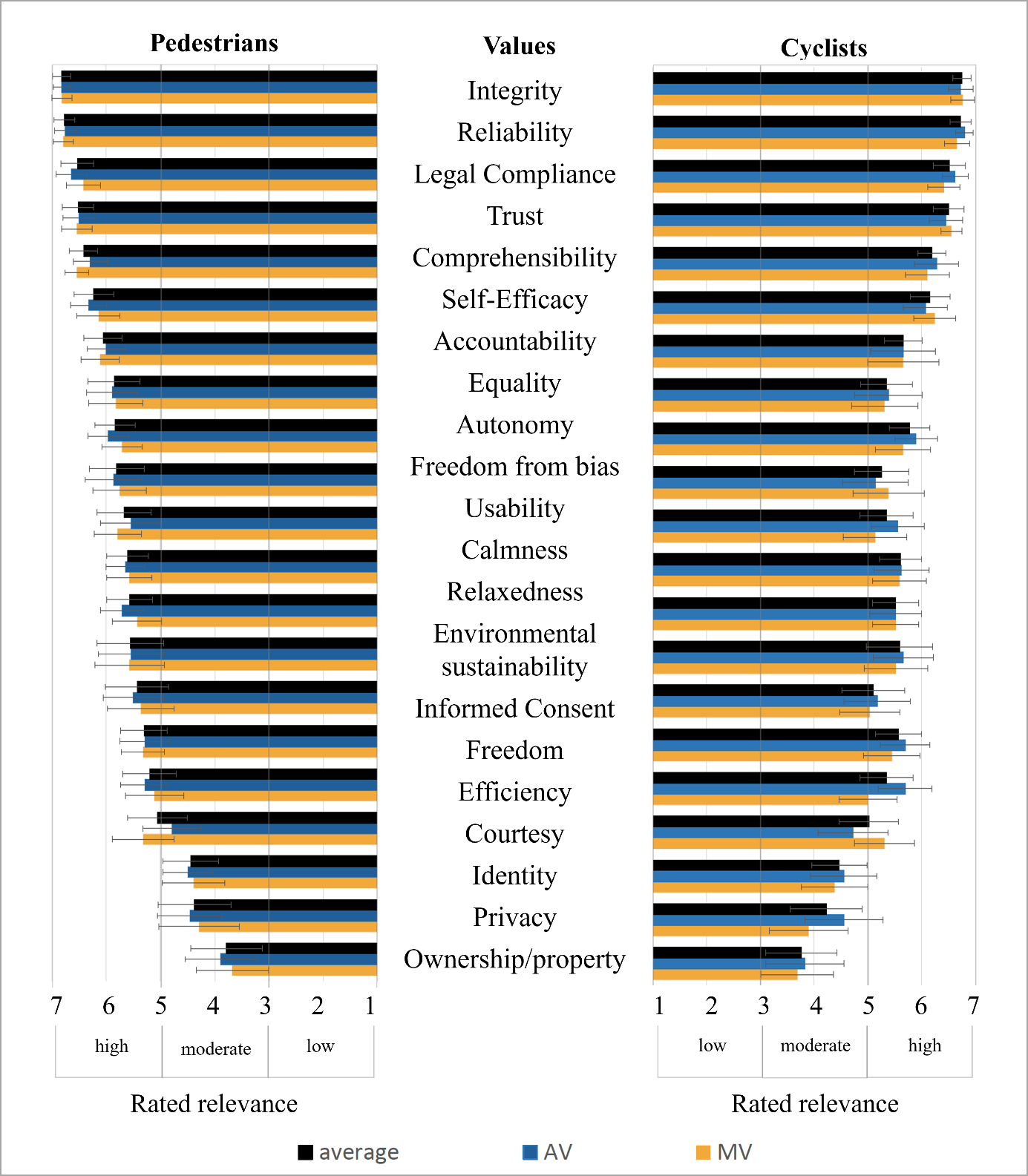
For descriptive purposes, ratings were categorized as low (1–3), moderate (3–5), or high (5–7). Overall, VRUs evaluated all values as moderately to highly relevant. For both pedestrians and cyclists, the highest ratings were observed for integrity, reliability, legal compliance, trust, comprehensibility, and self-efficacy (all mean ratings > 6). In contrast, identity, privacy, and ownership / property were rated as less relevant (all mean ratings < 5). Thus, H1a is supported for both pedestrians and cyclists. Contrary to H1b, no differences in the rated human values were found between the AV and MV conditions for either group.
3.3 Validation of quantitative relevance ratings via qualitative content analysis (H1)
To complement and validate the quantitative analyses and to further address H1, a qualitative content analysis was conducted to gain deeper insight into the value-based reasoning underlying VRUs' behaviour. The results are presented in Figure 5 (for numerical frequencies of assignments see Appendix B).
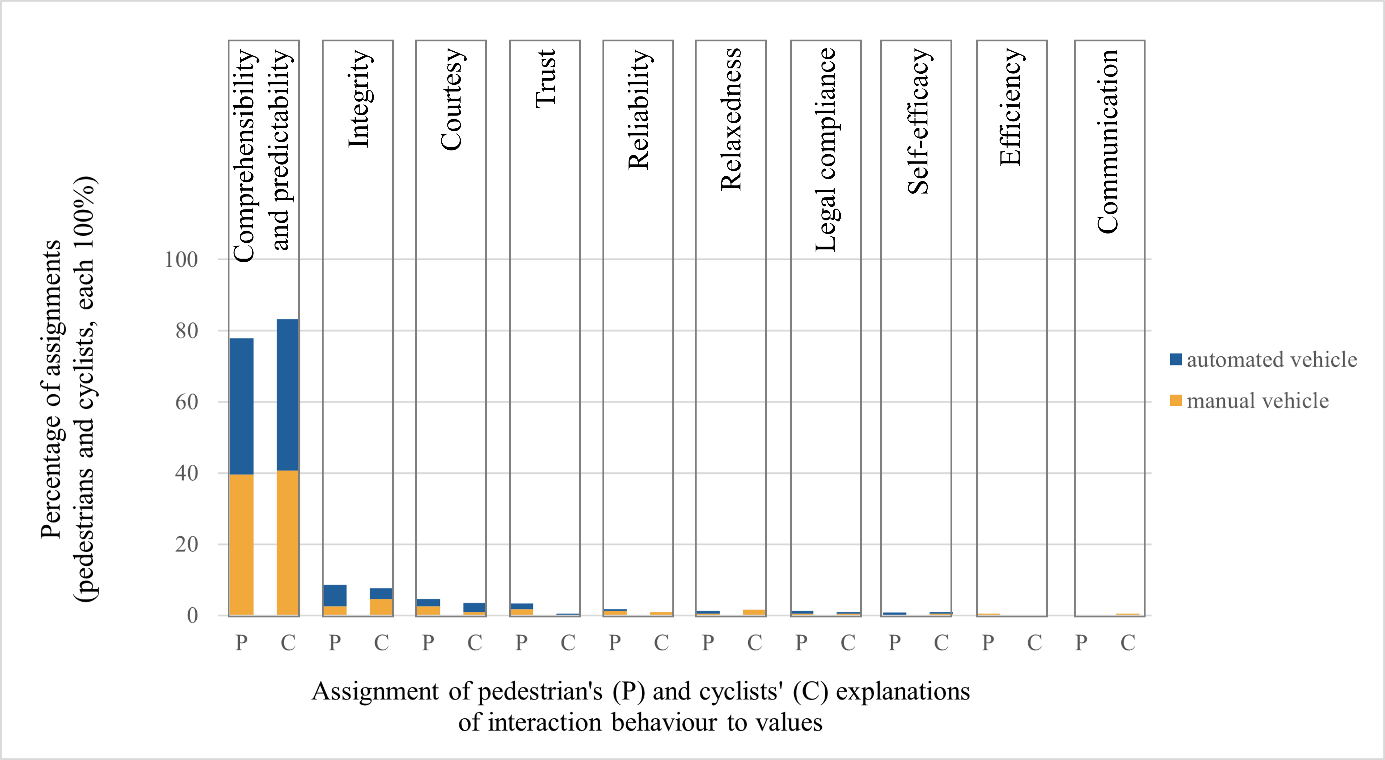
In addition to the presented frequencies of value assignments, a summary of the content analysis is provided, as it helps to better understand participants' interaction behaviour and to identify relationships between values.
Approximately 80% of the participants' explanations were assigned to the values comprehensibility and predictability, supporting the conclusion that both values were highly relevant for VRU–vehicle interactions. However, in the retrospective interviews, these two values could not always be clearly distinguished. Because participants (P) consistently reported their reasoning in the past tense, it was sometimes unclear whether statements such as “because there was plenty of space” (P9) represented a description of the situation (comprehensibility) or a prediction made prior to the decision (predictability). However, in most cases a clear distinction was possible.
About one third of the statements coded as comprehensibility or predictability (127 of 347) referred to the distance of the participant or the vehicle to the narrow passage, or to the distance between participant and vehicle. Another 95 statements addressed the speed of the participant or the vehicle, or how quickly the narrow passage or the encounter would be reached. An additional 18 statements referred to the time left before an interaction. For these three aspects (distance, speed, time), participants frequently added an evaluative judgment, whether the conditions were sufficient or insufficient, which they used to justify their behaviour. In some cases, these evaluations were directly linked to the value integrity (20 of 35 integrity-related statements; e.g., “mainly because the car ended up driving faster than I thought, and the gap was simply too small, so [it was] too unsafe”, P10). From the statements regarding comprehensibility, predictability, and integrity, a sequence of values could be identified: the comprehensibility of the situation, the anticipation of its development, and the subsequent evaluation in terms of integrity. However, most statements on comprehensibility and predictability contained only a judgment without an explicit link to integrity, e.g., “The car came very slowly. And it gave me the impression that it would stop and remain standing. And the indicator was set very late. And that's why I thought I could easily make it”, P125. As in this example, 47 statements referred to the use of the indicator. Eighteen statements indicated that participants were unable to predict the behaviour of the oncoming vehicle, while an additional thirteen statements referred to the vehicle's position or the initiation of its overtaking maneuver.
In some cases, comprehensibility and predictability judgments also led to evaluations in terms of courtesy (seven of eighteen courtesy-related statements; e.g., “The car and I were roughly at the same point, and then I decided to wait considerately”, P26). Further statements coded as courtesy referred to implicit traffic rules (e.g., “I just know it that way—if a car signals, then I wait”, P1). In addition, in all of the four statements assigned to self-efficacy, participants first assessed the comprehensibility / predictability of the situation. This assessment subsequently guided their self-efficacious interaction decisions (e.g., “I had the feeling that the car was moving very slowly behind the Dacia. So, I took the opportunity, because I also knew that I was fast enough”, P112).
The value trust was reflected in nine statements, with eight of these statements having been provided by pedestrians. Two of them expressed high trust in automated vehicles, two low trust, two high trust in human drivers, and one low trust in human drivers. Two additional participants stated that their trust increased through repeated exposure to the situation. Repetition of the scenario was also mentioned in 11 further statements assigned to comprehensibility / predictability.
In five of the six statements regarding reliability, VRUs expressed concern about not being seen by the driver, whereas none of the statements referred to whether the automated vehicle had recognized the participant. Regarding relaxedness, five of the six statements indicated that participants felt no stress and could therefore wait, while one statement referred to the calmness of the driver. Only a small proportion of statements (3%) were assigned to the remaining values—legal compliance, efficiency, and communication—with one to five statements each.
3.4 Prediction of VRUs' interaction behaviour in the space-sharing scenario (H2, H3)
To test whether interaction behaviour could be predicted by participants' quantitative value ratings (H2), distance (H3a), and the vehicle's driving mode (H3b), GLMMs were calculated. To include the human values in this analysis, correlations were first computed, PCA were conducted, and internal consistencies were assessed (see Section 2.5).
Pedestrians. The correlation analysis showed that each value correlated with at least one other value at r ≥ .30, with 13 correlations exceeding r = .50 (6%; see Appendix C for details).
The subsequent PCA for pedestrians yielded a four-component solution (see Appendix D for details):
-
Safe interaction: integrity, reliability, trust, legal compliance (Cronbach's α = .85)
-
Relaxed interaction: calmness, relaxedness, freedom, identity (Cronbach's α = .78)
-
Functional interaction: usability, efficiency (Cronbach's α = .76)
-
Self-efficacious interaction: self-efficacy, autonomy, equality (Cronbach's α = .40)
These four value components were included as fixed effects in the GLMM together with the environmental factors distance, driving mode, and temperature. Table 1 summarizes the results. As waiting was coded as 0 and being the first to pass through the narrow passage was coded as 1, a negative estimate (Est.) for the value components indicates that the probability of waiting increases.
| Fixed effects | Est. | SE | t | 95% CI | p | OR* |
|---|---|---|---|---|---|---|
| Safe interaction | -0.28 | 1.32 | -0.21 | [-2.88, 2.32] | .831 | 0.06 |
| Relaxed interaction | -1.53 | 0.76 | -2.01 | [-3.03, -0.03] | .046 | 0.05 |
| Functional interaction | -0.16 | 0.59 | -0.27 | [-1.34, 1.01] | .785 | 0.26 |
| Self-efficacious interaction | 0.04 | 1.36 | 0.03 | [-2.65, 2.73] | .976 | 0.07 |
| Distance | -6.44 | 0.15 | -4.18 | [-0.95, -0.34] | <.001 | 0.39 |
| Driving mode | 5.15 | 3.50 | 1.47 | [-1.76, 12.07] | .143 | 0.17 |
| Distance * driving mode | -0.30 | 0.21 | -1.45 | [-0.71, 0.11] | .148 | 0.49 |
| Temperature | -0.20 | 0.13 | -1.52 | [-0.45, 0.06] | .132 | 0.64 |
| Random effects | Est. | SE | z | 95% CI | p | |
| Random intercept: participants | 2.84 | 2.73 | 1.04 | [0.43, 18.66] | .297 |
The intraclass correlations were ICCadjusted = .584 and ICCconditional = .368. The fixed effects explained 37% of the variance in interaction behaviour (pseudo-R²marginal = .37). When the random intercept for participants was included, the proportion of explained variance increased to pseudo-R²conditional 74%. Although the random intercept was not statistically significant, the increase in pseudo-R2 due to the random effect shows that accounting for interindividual differences improves model fit. However, given the small sample size (N = 28), these results should be interpreted with caution. In addition to the inferential analyses, descriptive results are therefore presented to examine the plausibility of the findings.
The relaxed interaction component significantly predicted interaction behaviour (H2, p = .046). When only the relaxed interaction component was included in the GLMM (excluding the other value components, including the other predictors), the effect remained significant, though the p-value decreased to .017. Pedestrians who valued relaxed interactions were more likely to wait until the vehicle had passed the narrow passage (see Figure 6).
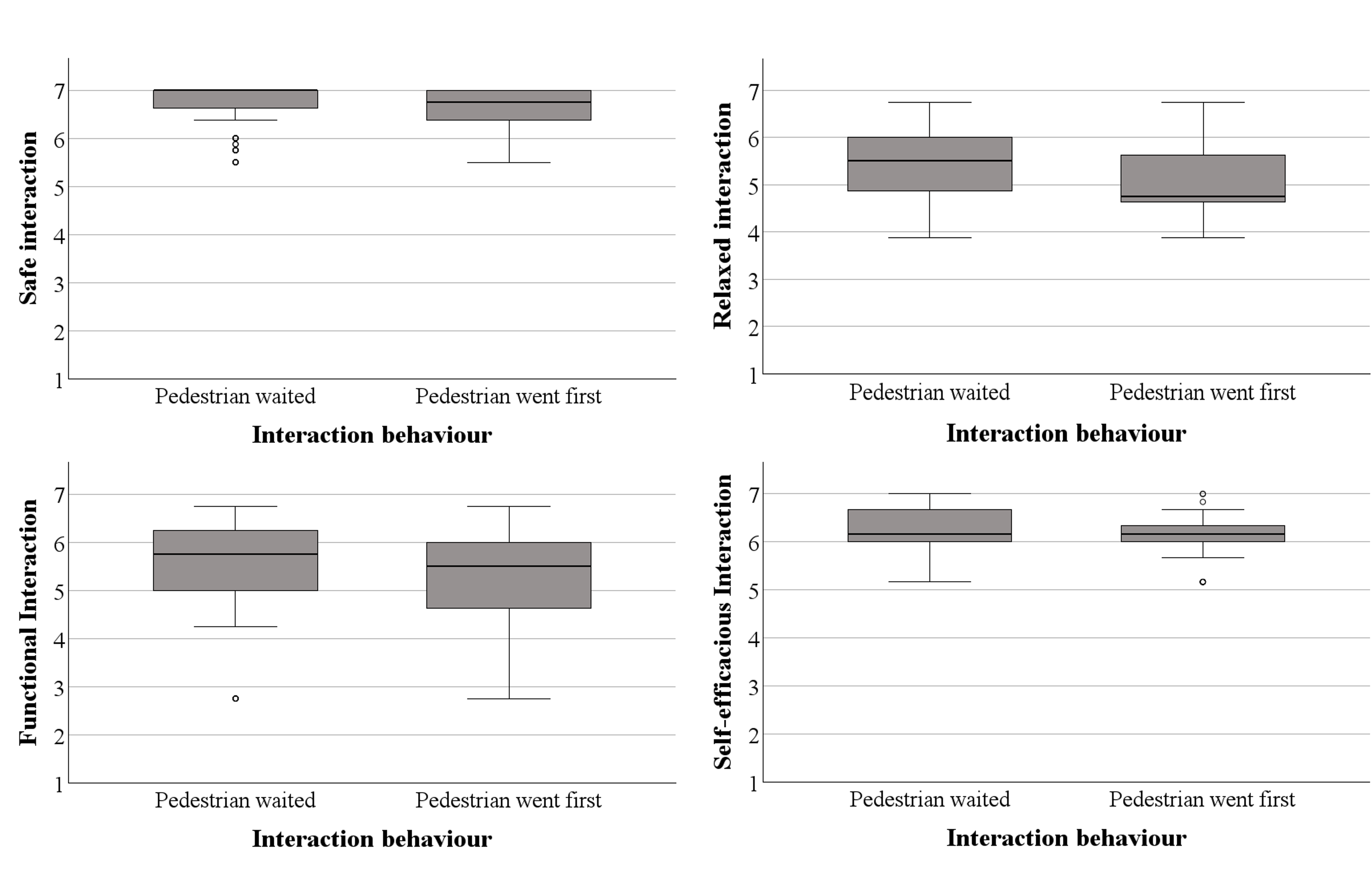
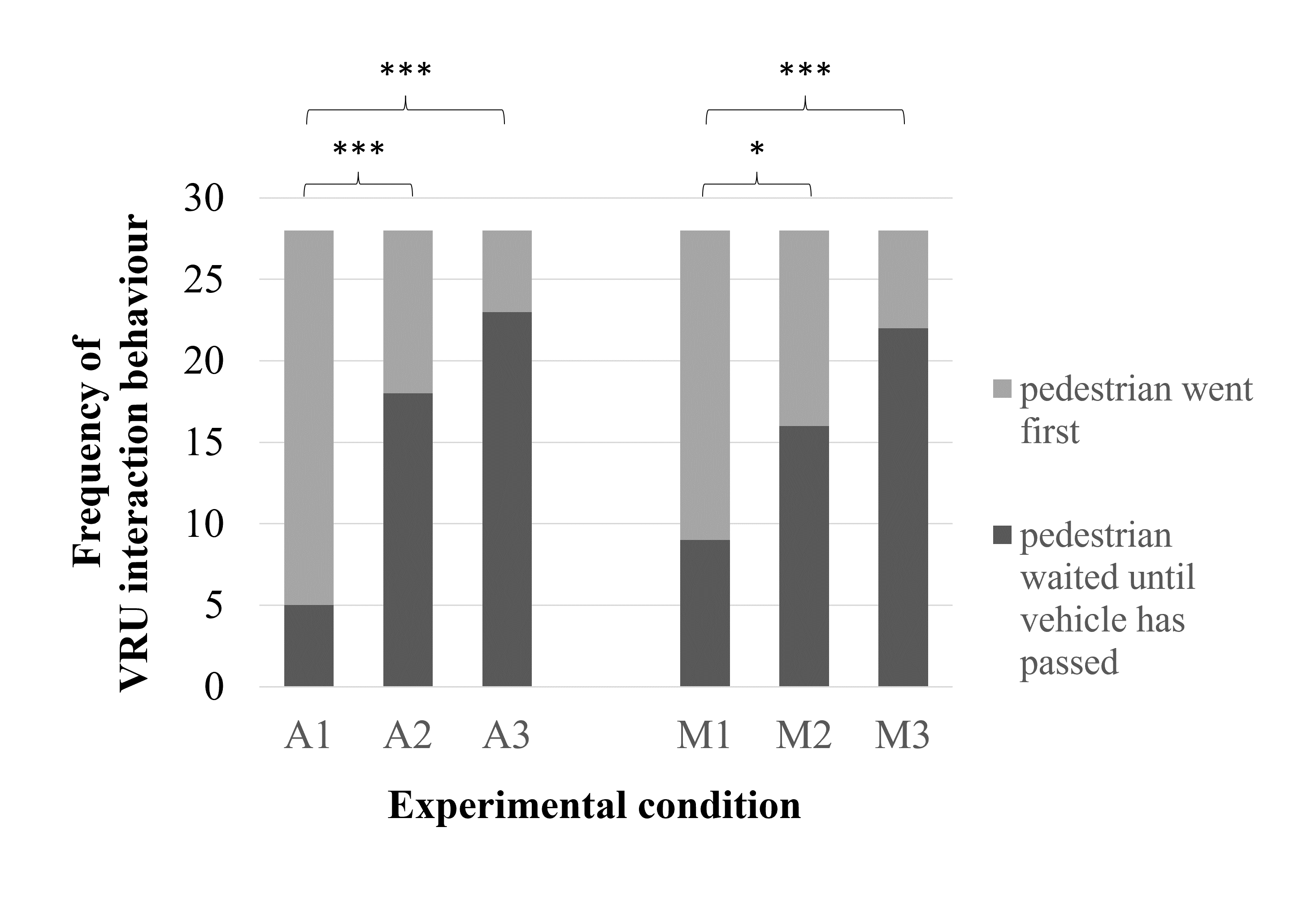
As hypothesized in hypothesis H3a, distance significantly predicted interaction behaviour (see Figure 7). Driving mode did not significantly predict interaction behaviour (H3b, Figure 7). Due to potential model instability of the GLMM, a post-hoc test (McNemar test) was also conducted to examine possible effects of driving mode, which likewise revealed no significant differences. Also, the random intercept for participants was not significant.
Cyclists. Among cyclists, each rating of participants' values correlated with at least one other value at r ≥ .30, and 38 correlations (18%) even exceeded r > .50 (see Appendix C for details).
The PCA for cyclists yielded a three-component solution for the underlying value components (see Appendix D):
-
Safe interaction: integrity, reliability, trust, legal compliance (Cronbach's α = .74)
-
Empowerment: comprehensibility, accountability, self-efficacy (Cronbach's α = .82)
-
Motivators: freedom from bias, identity, courtesy, calmness, relaxedness, environmental sustainability (Cronbach's α = .84)
The results of the GLMM for cyclists are presented in Table 2. The intraclass correlations were ICCadjusted = .20 and ICCconditional = .14. The fixed effects explained 30% of the variance (pseudo-R²marginal) of interaction behaviour. When the random intercept for participants was included, the proportion of explained variance increased to pseudo-R²conditional 44%. Again, the random intercept was not statistically significant. Given the small sample size (N = 29), these results should be interpreted with caution. Estimating a model with driving mode as a random slope was not possible due to small sample size.
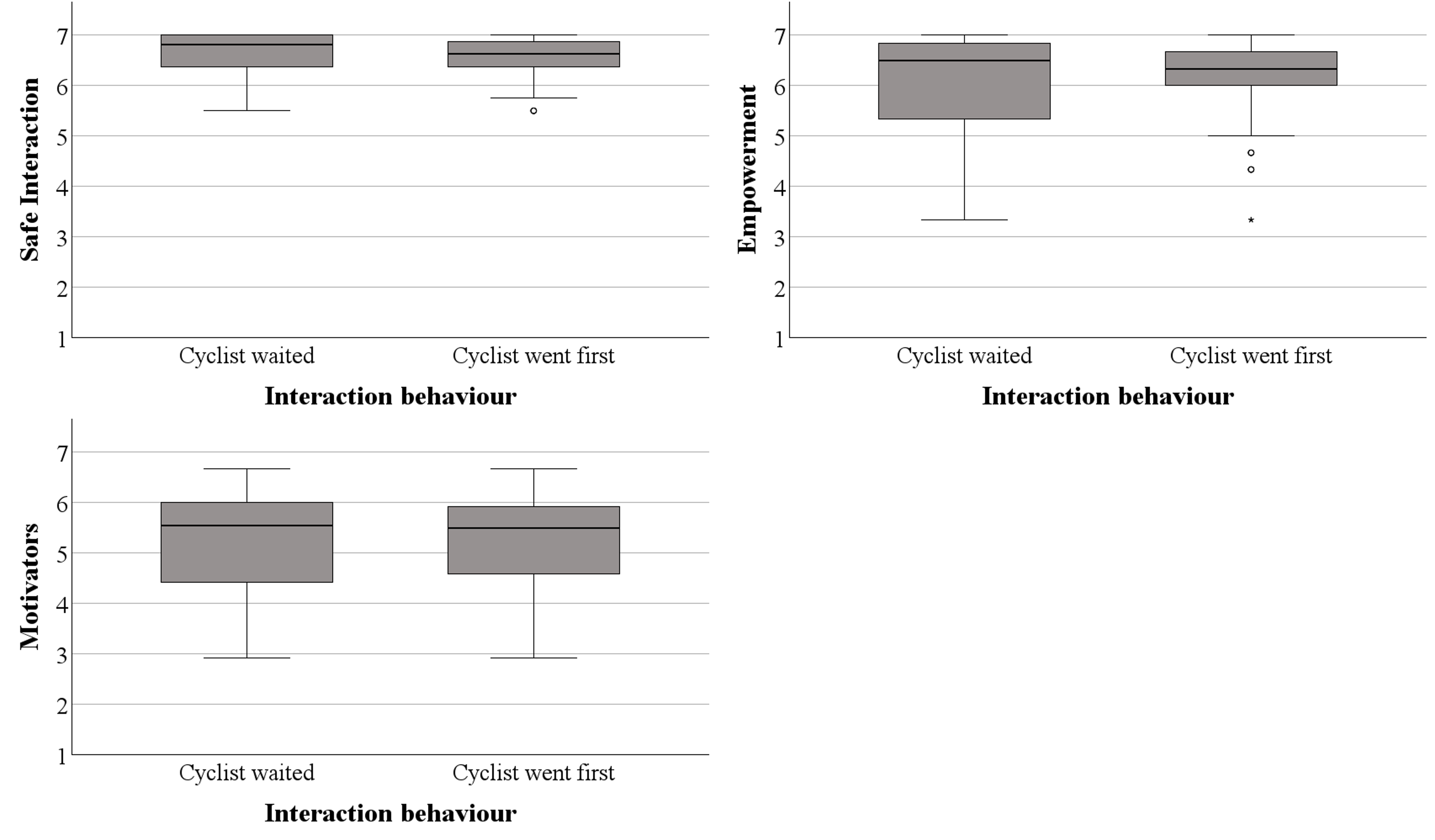
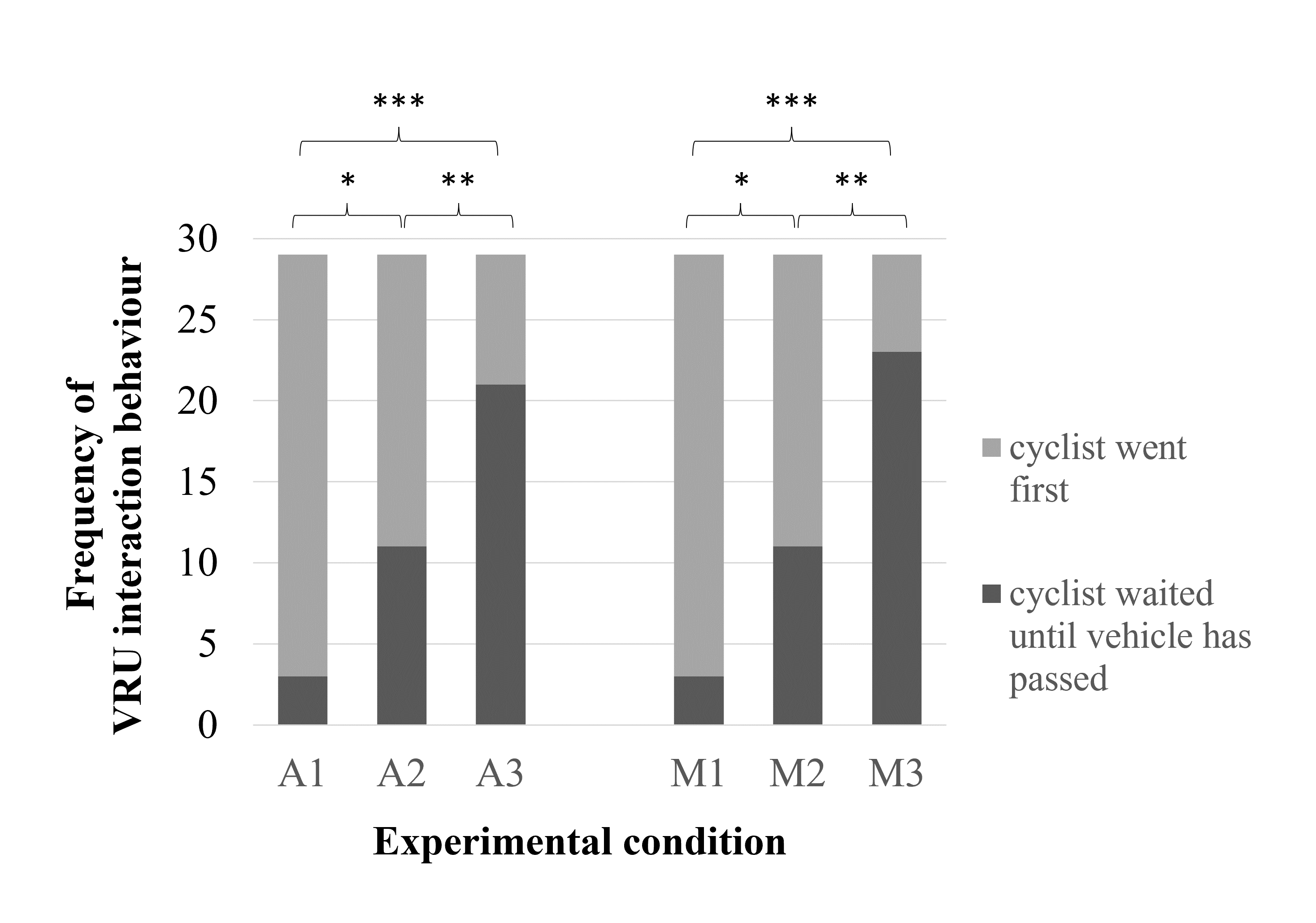
In contrast to H2, none of the components significantly predicted interaction behaviour of cyclists (see Figure 8 for graphical representation). Consistent with the findings for pedestrians, distance emerged as a significant predictor of interaction behaviour (H3a, see Figure 9). Driving mode did not predict interaction behaviour (nor in the post hoc test; H3b), and the random intercept for participants was also non-significant.
| Fixed effects | Est. | SE | t | 95% CI | p | OR* |
|---|---|---|---|---|---|---|
| Safe interaction | -0.32 | 0.78 | -0.41 | [-1.86, 1.22] | .685 | 0.73 |
| Empowerment | 0.37 | 0.36 | 1.01 | [-0.35, 1.09] | .312 | 1.45 |
| Motivators | -0.08 | 0.29 | -0.29 | [-0.66, 0.49] | .775 | 0.92 |
| Distance | -0.38 | 0.08 | -4.81 | [-0.54, -0.22] | <.001 | 0.68 |
| Driving mode | -0.95 | 2.89 | -0.33 | [-6.66, 4.75] | .742 | 0.39 |
| Distance * driving mode | 0.04 | 0.11 | 0.39 | [-0.17, 0.25] | .695 | 1.04 |
| Temperature | 0.10 | 0.19 | 0.52 | [-0.27, 0.46] | 603 | 1.10 |
| Random effects | Est. | SE | z | 95% CI | p | |
| Random intercept: participants | 0.51 | 0.67 | 1.77 | [0.40, 6.56] | .442 |
4. Discussion
To evaluate the three research objectives, a field experiment was conducted in a Wizard-of-Oz setting. The results of the manipulation check revealed that this manipulation was successful. Ninety-three percent of pedestrians and all cyclists believed that they were interacting with an AV. Compared to other Wizard-of-Oz studies, this represents a very high credibility rate (e.g., 19% credibility in a study by Harkin et al., 2025; 59% in a study by Hensch et al., 2019; 45% in a study by Rodríguez Palmeiro et al., 2018). This relatively high rate may be attributable to the fact that participants were merely informed that the vehicle was capable of fully autonomous driving on the test track, whereas, for instance, Harkin et al. (2025) conducted their study in real-world traffic.
4.1 Relevance of values in VRU-AV interactions in the space-sharing scenario (H1)
Quantitative findings suggest that VRUs perceive many values as highly relevant in VRU-AV interactions. However, only about half of these values were reflected in participants' qualitative explanations of their decisions. This discrepancy may suggest that quantitative ratings of values reflect overarching, cross-situational values, whereas the qualitative analysis highlights situational manifestations of these values (cf. Halama et al., 2025b). Following this idea, it could be assumed that the two assessments capture different expressions of the same values, which may lead to variation in their perceived relevance. Values may have expressions that remain stable over time. Similar to the conceptualization of trust in automation by Hoff and Bashir (2015), value expressions may be influenced by people's dispositional tendencies and experiences from prior interactions. This could imply that cross-situational value expressions are only partially retrievable, as they may be stored in implicit memory as part of long-term memory (e.g., Tulving, 1972). In addition, analogous to situational trust (Hoff & Bashir, 2015), there may exist situational expressions of values derived from cross-situational ones, that resemble activated expressions of values in long-term memory by the characteristics of a given situation (Verplanken & Holland, 2002). Such situational expressions are likely easier for participants to recall, as they can relate to concrete features of the situation and the course of the interaction. However, specific situations may activate only a limited number of value expressions that are closely tied to situational characteristics. This would make the assessment of values highly situation-dependent and, consequently, variable. Future research should therefore examine whether values comprise both temporally stable and situation-specific components.
The magnitude of relevance ratings of values in this study was comparable to previous studies (Halama et al., 2025b; Halama et al., 2025a). Values linked to safe interaction—such as integrity, reliability, legal compliance, trust, and comprehensibility—were rated to be particularly relevant. The qualitative analysis similarly emphasized comprehensibility, predictability, and integrity as the most frequently cited values, which reveals partial overlap between both value measures.
Notably, the results of the present study revealed differences between the two measures of values for trust and courtesy. Trust was rated highly in the quantitative assessment (M ≈ 6.5) and is recognized in the literature as an important construct in VRU-AV interactions (e.g., KC et al., 2025; Kohn et al., 2021; Razmi Rad et al., 2020; Lau et al., 2024). However, only 2% of the participants' statements were related to trust. This discrepancy may be attributed to the fact that there were no situational characteristics that could have activated the value of trust, as participants were instructed that the AV was capable of driving the test track fully autonomously and that intervention by the safety driver would not be necessary. In addition, the oncoming vehicle always moved very slowly at 10 km/h, and the drivers were instructed to behave in a way that ensured participants were never exposed to any risk. Conversely, courtesy received moderate ratings (M ≈ 5) but was among the most frequently assigned values in the content analysis. Maybe courteous behaviour is closely linked to safe behaviour and serves as an additional rationale for waiting when participants were uncertain about their decision.
Comprehensibility and predictability were the most frequently assigned values in the qualitative content analysis, accounting for about 80% of the statements. One possible explanation is that the characteristics of the scenario activated these values in the situation. The constriction and the dynamic factors of the scenario (vehicle speed, distance to the vehicle) were central for the VRUs in justifying their decisions. This situational relevance of the dynamic characteristics was likely further enhanced by the manipulation of distance, which may explain the high relevance of these two values. This could also account for their higher relevance compared to the laboratory study by Halama et al. (2025b), where participants' perspective was constant and no variation in dynamic factors was implemented.
Another possible explanation for the high relevance of comprehensibility and predictability may be found in the sequential pattern of values also identified by Halama et al. (2025b). Participants often first referred to the comprehensibility of the situation, followed by its predictability and an assessment of whether they could enter the narrow passage before the vehicle. Some participants indicated that they could not predict the behaviour of the driver or the AV and based their decision to wait on this uncertainty. Others estimated they would not make it through the gap in time and, consequently, chose to wait. Further participants related this assessment to their integrity, which informed their decision to pass or not. Other responses suggest that comprehensibility and predictability may be linked to the activation of additional values, such as courtesy, self-efficacy, and relaxedness. That is, comprehensibility and predictability may initially be relevant in the situation and, if present, trigger the activation of further values.
Taken together, these findings suggest that several values (e.g., comprehensibility, trust, legal compliance, reliability, accountability, equality) may serve as relevant context-independent values, whereas only interaction-relevant values are activated in specific situations. Future research should investigate whether cross-situational and situationally activated values can be empirically distinguished in VRU-AV interactions. If so, it could also be examined whether situationally activated values follow a sequence in which comprehensibility and predictability play a central role.
4.2 Human values as VRU-related factors of VRUs' behaviour in the space-sharing scenario (H2)
Relaxed interaction emerged as a significant predictor of behavioural intention among pedestrians but not among cyclists. However, this finding suggests that values can, in general, serve as VRU-related factors of VRUs' behaviour. These results indicate that future studies should not only consider frequently assessed safety-related constructs such as perceived safety (e.g., Lau et al., 2024), perceived risk (e.g., Hulse, 2023), or trust (Lau et al., 2024), but also “softer” interaction-related values such as relaxedness, calmness, and courtesy.
However, the question arises as to why only the component relaxed interaction was able to predict pedestrians' behaviour, even though numerous values were rated as relevant for AV–VRU interactions in both the quantitative ratings and the qualitative content analysis. Several explanations may account for this finding. First, as already mentioned, the small sample size limited the statistical power. According to Lüpsen (2024), a sample size of around 100 participants would be desirable for GLMM analyses. Second, values should not be interpreted as distinct constructs, as indicated by the high correlations between values (see Appendix C). High correlations result in high amounts of shared variance among value components, which is also supported by the GLMM results for pedestrians (including all components vs. relaxed interaction only). Therefore, it is likely that the relaxed interaction component also captures aspects of other components, such as safe interaction. Third, as noted above and proposed by Halama et al. (2025b), the quantitative ratings included in the GLMM might reflect cross-situational values rather than those directly relevant to the interaction, and therefore may have been too general to predict specific behaviour. Fourth, the vehicle encounters in the study always behaved in a consistent and rule-compliant manner, enabling a functional interaction and respecting participants' autonomy. Thus, as discussed above, values relevant for self-efficacious and functional interactions may not have been activated in the situation. Fifth, the quantitative ratings of safe interaction showed limited variability (see Figures 6 and 8). Safety-related values appear to be universally highly relevant to participants, which reduces their predictive variance. Finally, participation in the study may have been self-selective. Individuals who perceived AV interactions as highly risky and who would therefore consistently choose to wait may not have participated. This could also explain why, unlike in some previous studies (e.g., Dommes et al., 2021; Vlakveld et al., 2020), no significant differences emerged between driving modes.
Overall, the results highlight that values can serve as VRU-related factors of VRUs' behaviour, although their predictive power in the present study was limited. Future studies should examine the role of human values as VRU-related factors in greater detail by manipulating different situational characteristics while assessing values both cross-situationally and situation specific.
4.3 Distance and driving mode as environmental factors of VRUs' behaviour in the space-sharing scenario (H3)
As hypothesized in H3a, distance emerged as a significant environmental predictor. The farther pedestrians and cyclists were from the narrow passage, and thus from the approaching vehicle, the higher their likelihood of waiting. This finding aligns with previous research (Nuñez Velasco et al., 2019; Tian et al., 2023) and with participants' qualitative explanations, where distance was frequently cited as a key behavioural determinant. This consistency suggests that environmental and VRU-related factors are interrelated and that VRU-AV interactions should be understood as complex, multifaceted situations requiring an integrative perspective.
Contrary to H3b, and consistent with several studies (e.g., Dey et al., 2019; Nuñez Velasco et al., 2019; Rodríguez Palmeiro et al., 2018), driving mode did not predict interaction behaviour. Other studies, however, have reported significant effects (e.g., Dommes et al., 2021; Harkin et al., 2025). A plausible explanation is that the manually driven vehicle and the purported AV behaved identically. Apart from the visibility of the driver (mirrored vs. visible windows), both shared the same situational characteristics (e.g., distance, speed, trajectory). This interpretation is supported by the qualitative data showing comparable value patterns across driving modes (Appendix B). Thus, the proposed value sequence (see Section 4.1) may not differ between modes.
Another explanation is that VRUs may differ individually in their responses to driving mode. However, this variation may have leveled out when examining the average effect at Level 1 at the GLMM. Although the random intercept for participants in the GLMM was not significant, explained variance increased markedly—from 37% to 74% for pedestrians and from 30% to 44% for cyclists—consistent with other studies (e.g., Razmi Rad et al., 2020; Halama et al., 2025b). This may indicate interindividual variation in vehicle–interaction behaviour. This interpretation is further supported by the statements associated with the value of trust. Some participants expressed high levels, while others expressed low levels of trust in the AV and the driver. However, due to the small sample size, inclusion of a random slope for driving mode was not feasible.
Overall, the findings underline the central role of distance to a vehicle as an environmental predictor for VRUs' behaviour, while the influence of driving mode remains inconclusive. Future studies should explore the potential differential effects of driving mode on VRUs' interaction behaviour using larger samples. Considering human values simultaneously may further help to understand the relationships between environmental factors and interaction behaviour.
4.4 Limitations
The present study has some limitations that need to be considered. First, although participants believed they were interacting with an automated vehicle in a field setting, the situation remained artificial. Replication in naturalistic driving studies with more realistic conditions and more heterogeneous samples is needed to increase the generalizability of the results. In real traffic, VRUs may behave more cautiously when interacting with an automated vehicle (cf. Dommes et al., 2021; Harkin et al., 2025). Differences in the evaluation of values are also conceivable, particularly with regard to safety-related values, when interactions occur outside a controlled study environment.
Second, despite efforts to standardize the interaction situation, environmental factors such as changes in weather conditions or ambient noise from pedestrians or vehicles on adjacent roads may have influenced participants' behaviour. Such confounding variables may have caused distraction or increased mental workload, potentially leading participants to choose to wait more often in the situation.
Third, the starting point was experimentally manipulated and identified as a significant predictor. However, it can be assumed that a more precise measurement of the distance or time-to-collision (TTC) between the VRUs and the approaching vehicle, shortly before participants had to decide on a behavioural option, would have explained even more variance. It is therefore conceivable that the effect of distance may even be stronger than indicated by the GLMM results.
4.5 Conclusion
The present study investigated the relevance and predictive role of VRUs' values, as well as the predictive effects of distance and driving mode on interaction behaviour. VRUs rated their values as highly relevant, highlighting their importance in real-world VRU-AV interactions. In the pedestrian condition, values associated with relaxed interaction showed a predictive effect in the quantitative analysis. In contrast, comprehensibility and predictability played a central role in the qualitative analysis and may activate other situational values, such as integrity, courtesy, and self-efficacy. Regarding environmental factors, distance to the narrow passage significantly predicted behaviour: The farther VRUs were from the narrow passage, the more likely they were to wait. Driving mode, in contrast, had no effect.
Overall, the study demonstrates that both human values and environmental factors are relevant for understanding VRU behaviour and can inform the design of interactions that are safe and value-oriented.
Acknowledgement
The authors gratefully acknowledge Matthias Beggiato for his helpful recommendations regarding the conduct of the study. Furthermore, they thank Anthony Wenke, Lili Peteri, Marten Berlin, Magdalena Streller, Weda Morawietz, Constanze Klose and Leonora Jakschik for their contributions to the study as research interns and student assistants, particularly in supporting literature research, experimental procedure and coding.
The pre–peer-review version of this manuscript forms part of the doctoral dissertation of Josephine Halama, which was published in 2026 at Chemnitz University of Technology.
CRediT contribution
Josephine Halama: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Project administration, Visualization, Writing—original draft, Writing—review & editing. Julius Alexander Knittel: Data curation, Formal analysis, Writing—original draft, Writing—review & editing. Stefan Brandenburg: Conceptualization, Methodology, Project administration, Resources, Supervision, Writing—original draft, Writing—review & editing.
Data availability
The data are available on request to the authors.
Declaration of competing interests
The authors report no competing interests.
Declaration of generative AI use in writing
During the preparation of this work the authors used ChatGPT (GPT-5, OpenAI) for language improvement. The output was reviewed and revised by the authors who take full responsibility for the content of the publication.
Ethics statement
The methods for data collection in the present study have been approved by the ethics committee of Chemnitz University of Technology (Decision #101605759).
Funding
No external funding was used in this research.
Editorial information
Handling editor: Mette Møller, Technical University of Denmark (DTU), Denmark.
Reviewer: Reginald R. Souleyrette, University of Kentucky, the United States of America.
Submitted: 23 October 2025; Accepted: 5 March 2026; Published: 13 March 2026.