Long Combination Vehicles Overtaking Cyclists: A Field Study in Regular Traffic
Abstract
Increased cycling, also in rural areas, is important for transitioning to a more sustainable transport system. Also, long combination vehicles (LCVs), in Sweden labelled high-capacity transport (HCT; up to 34.5 m, the previous limit was 25.25 m) can contribute to this goal. If granted access to a larger share of the road network, those trucks can be used more effectively. However, cycling and other active transport on those roads may be negatively impacted. To investigate direct and indirect effects on cyclists when LCVs are using the same road, a study was conducted in real traffic. Nineteen experienced road cyclists rode on a 5 km long rural road segment. Three trucks of different lengths were driven along the same route, instructed to overtake the cyclists where possible and with a full lane change. This generated 175 overtakes by the trucks and 607 overtakes by other traffic. The cyclists reported the overtakes with the trucks to feel safe and found the length of the truck not to be relevant if a full lane change was made while overtaking. The trucks needed more time to overtake than other traffic, and they also waited longer for an overtaking opportunity. In a car-following situation, the clearance of the following vehicles was influenced by the lead vehicle, making it especially important for heavy vehicles to give cyclists a wide berth. Pending further investigations, the conclusion is that for cyclists to feel safe, a full lane change when overtaking should be standard procedure not only for LCVs, but for motorised traffic in general.
1. Introduction
It is widely recognised that cycling plays an important role in increasing the sustainability of the transport system, even though the focus is mostly on urban areas (e. g. Fishman, 2016). However, not least the advent of e-bikes enables people to cycle longer distances (Plazier et al., 2023), overcoming barriers posed by headwind and hillier areas (Haustein & Møller, 2016; Rérat, 2021). This increases the potential for cycling on rural roads as a viable alternative to car use. Especially in rural areas e-bikes are estimated to have a high potential to reduce carbon emissions (Philips et al., 2022). According to Farah (2016), around 90 percent of European rural roads are undivided two-lane roads, which means that rural cycling happens largely in mixed traffic.
Since December 2023 long combination vehicles (LCVs), in Sweden labelled High Capacity Transport (HCT), are allowed on a limited network of primarily divided Swedish roads. These vehicles are up to 34.5 m long and thereby exceed the previous maximum length of 25.25 m with 37 percent. The increased efficiency in transport capacity and energy (OECD, 2009) is also expected to lead to fewer trucks on the roads for the same amount of transported goods (Sandin, 2016).
If LCVs are to be exploited more, they need to access a larger share of the road network that is frequently used by cyclists. This inevitably means that cyclists would be overtaken by them and encounter them as oncoming vehicles. Overtakes are an important contributing factor to how comfortable cyclists feel in mixed traffic (for a summary see Kircher & Niska, 2023). Large vehicles create more discomfort than smaller ones (Kircher et al., 2024), and risk ratings were found to correlate with a combination of lateral clearance and speed of the overtaking vehicle (Llorca et al., 2017). In a cycling simulator study, it was concluded that cyclists prefer overtaking vehicles to perform a full lane change. The minimum acceptable clearance was 2.5 m, and where that was not possible due to limited road width, overtaking should occur with reduced speed, or the driver should wait (Kircher et al., 2024). The study also showed that cyclists who regularly ride on rural roads for training accept smaller margins than commuters or cyclists who do not usually ride on rural roads.
In a test track study with a controlled setup, an LCV and a standard truck of 16.5 m length were compared when passing experienced cyclists at different lateral distances and speeds (Kircher et al., 2025). The cyclists rode on rollers and made ratings with a verbal commentary of each overtake. Lateral distance followed by speed had the highest impact on the cyclists’ risk ratings, with truck length playing a minor role. A similar pattern was observed for measured aerodynamic loads. While the participants in the test track study considered the setup to reflect reality well, they also stated that they felt safer than they would have in a comparable situation in real traffic, where additional factors like the weather, the road surface and other traffic may play a role.
Dozza et al. (2016) describes four phases of an overtaking manoeuvre—approaching, steering away, passing, and returning. In each phase, the driver can make choices that impact their own progress, the cyclist and surrounding traffic. In the approach phase, the driver must consider the sight distance, oncoming traffic, traffic ahead, the cyclist’s lateral position and speed, the dimensions and speed of their own vehicle and potentially additional factors like load, when planning when and how to overtake. This is moderated by the driver’s personal margins and attitude (Haworth et al., 2018). In studies investigating how passenger cars are overtaken, Llorca et al. (2013) found that a longer time spent behind a slower moving vehicle is associated with the acceptance of smaller gaps in oncoming traffic. This was confirmed by Farah (2016). Levulis et al. (2015) found that the size of the oncoming vehicle may affect the judgement of the available gap. When waiting behind the cyclist, the driver selects the distance they keep, and whether to take any additional action. Due to the higher seating position, heavy vehicle drivers may have better visibility. The larger volume and weight of the vehicle can affect acceleration, and the distance needed for overtaking. During the approach phase, cyclists have limited control over the manoeuvre. They can choose their lateral position to some extent or make gestures (Kircher & Lindman, 2024), which may influence the driver’s choice when to initiate the steering away phase (Rasch et al., 2020).
The driver decides when and how far behind the cyclist to initiate the steering away phase, at which angle to steer away, whether to use the indicators and whether to take any other action. Again, the size and weight of heavy vehicles must be considered. The cyclist can potentially adjust their lateral position.
In the passing phase, lateral clearance, passing speed, passing duration and other behaviour are important factors. This phase, particularly lateral clearance, has received most research attention so far (Kircher & Niska, 2023). Especially for longer trucks, the passing duration and also the aerodynamic effects on the overtaken cyclist are crucial factors (Kircher et al., 2025). Again, the action left to the cyclist is a potential adjustment of their lateral position.
When the return phase is initiated and how it is performed can influence the cyclist’s perception of the overtake. For longer trucks the timing can be more difficult. The cyclist can brake or make an evasive manoeuvre towards the road edge, but also has following traffic to consider.
To be able to assess several of the mentioned factors in a more natural setting than in the previous simulator and test track environments, a semi-controlled study in real traffic was conducted with recruited truck drivers and vehicles. The results from the controlled studies mentioned above led to the conclusion that the only ethically feasible approach was to require those “confederate” trucks to overtake with the widest possible margin. This would still allow an investigation of whether overtaking at the speed limit with a full lane change is acceptable for cyclists in the given environment. Also, due to the width of trucks (2.55–2.6 m), on most roads they must use at least part of the oncoming lane to overtake a cyclist even with a narrow margin, which means that the oncoming lane must be free. Therefore, the impact of oncoming traffic on waiting times can be assessed regardless of the lateral clearance with which the overtake is performed.
The following research questions are addressed:
-
How do cyclists perceive overtakes of trucks of different lengths (up to a length of 34.5 m) on a rural road if the manoeuvre is conducted with a full lane change? How does that compare to overtaking manoeuvres of ambient traffic?
-
Which factors are associated with the decision to overtake, and which factors influence how overtaking manoeuvres are performed with the confederate trucks and by ambient traffic?
-
Do the instructed overtakes with confederate trucks influence the overtaking behaviour of following vehicles? Does this differ from vehicles following ambient traffic?
2. Method
A field study in real traffic was run on a weekend (Friday to Sunday) in September 2024 with experienced cyclists and professional truck drivers.
2.1. Location
The study took place on a 5 km long stretch of road 664 between Vålberg and the E18 close to Karlstad, Sweden. The route belongs to the nationwide road network open to LCVs. It is also used regularly by cyclists and other active road users. The road is predominantly 9 m wide with shoulders of ca. 0.5–0.75 m width. The centre line is intermittent except for a length of 500 m, where it is solid. Visibility is generally good, with some locations where wide curves or slight hills reduce visibility. The average annual daily traffic is ca. 2800, and the share of heavy vehicles lies around six percent. The weather during the data collection was sunny, around 20 degrees and with low ambient wind.
2.2. Participants
One woman and two men participated as truck drivers. Five women and 14 men participated as cyclists. The latter group had a mean age of 54.6 ± 9.6 years, they cycled on average 5000 ± 3400 km outdoors annually, and they reported to be experienced road cyclists (on a scale from very inexperienced (0) to very experienced (10), three people reported “7”, two people reported “9”, all others reported “10”). One person reported to have cycled regularly for 3–5 years, all other participants had cycled regularly for more than five years.
2.3. Trucks
Three trucks were used in the study, henceforth called “short”, “medium”, and “long” truck (Table 1). Each driver drove the same truck throughout, for licencing and insurance reasons.
| Truck label | Total length | Configuration |
|---|---|---|
| Short | 16.5 m | Tractor (2 axles) and trailer (13.6 m, 3 axles) |
| Medium | 24.0 m | Truck (3 axles) and trailer (12.0 m, 4 axles) |
| Long | 34.4 m | Tractor (3 axles), trailer (16.0 m, 3 axles), dolly, trailer (13.6 m, 3 axles) |
2.4. Log equipment
Before the test ride, each participant’s bicycle was equipped with several data logging units (Figure 1). A lateral distance measurement device—a combination of a custom-built unit, a Garmin Edge 540 bike computer and a Garmin Varia 716 radar unit (Garmin Ltd., Olathe, Kansas)—was mounted on the seat rails and seat post. The device used an ultrasonic sensor to measure the lateral distance to the nearest object at ca. 22 Hz. It also had a GPS unit and an event button attached with a cable. The button was placed on the handlebars, within easy reach of the participant. The radar logged the distance to vehicles approaching from behind with 1 Hz within a range of up to 140 m. The vehicle speed at each measurement point was also logged. The radar unit also contained a video camera recording the scene behind the cyclist.
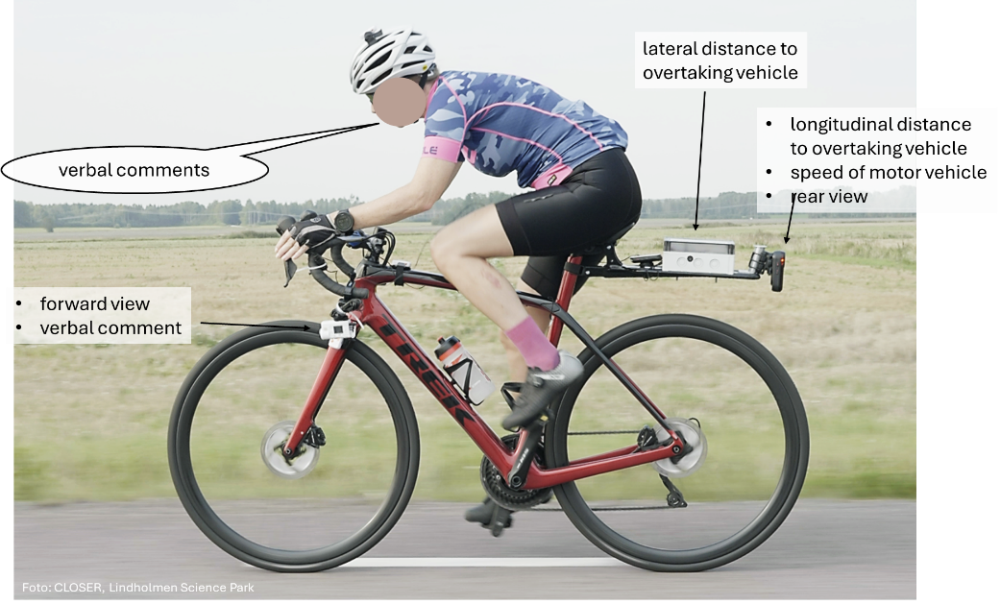
An action camera (Sony FDR-X3000) was mounted on the handlebars filming the forward traffic scene at a wide angle. A microphone was attached to the camera. It was fitted to the participants’ helmet strap to record a verbal commentary while cycling.
2.5. Procedure
The participants were run one or two at a time. After having signed an informed consent form, their bikes and helmets were equipped with the measurement devices. The participants were instructed to press the button on the handlebars each time after they had been overtaken by any vehicle. After ascertaining that the cyclists were familiar with the test route and the procedure of pressing the button, they started riding along the test route one by one. The truck drivers followed shortly after, also one by one, with the aim of overtaking the cyclists before turning around. The cyclists were asked to ride like they would have given the circumstances. The truck drivers were instructed to only overtake when they were certain that the manoeuvre could be performed safely, and to make a full lane change when passing.
When returning to the test centre for the first time, the cyclists were asked whether they were alright, and the equipment was checked for stability, before they rode off again. Upon returning again, the participants were interviewed alone or in pairs about their experiences with the confederate trucks and ambient traffic. The log equipment was removed from bikes and helmets, and the participants filled in a survey with general questions about cycling on rural roads and overtaking.
2.6. Analysis
Each overtake candidate identified via button presses in the data log was verified or discarded based on manual viewing of the forward (and where necessary rearward) video. Additional candidates were identified based on visual inspection of the log data in conjunction with video confirmation. In each verified case, the overtaking vehicle type and the presence of oncoming traffic (Table 2) was noted. The cyclist’s lateral position during the overtake was extracted from video and coded as riding “in the lane”, “on the shoulder”, or “other”, for example when changing the position during the overtake.
| Category | View when the overtaking vehicle appeared in the forward camera |
|---|---|
| None | No vehicle in forward view and last oncoming vehicle > 3 s ago |
| Just passed | No vehicle in forward view and last oncoming vehicle < 3 s ago; typically, after having waited behind cyclist |
| Far | Vehicle in forward view with 6 s or more left to reach the cyclist; overtaking with full lane change possible |
| Medium | Vehicle in forward view with between 3 s and 6 s left to reach the cyclist; overtaking with full lane change difficult to not possible, |
| Close | Vehicle in forward view with 3 s or less left to reach the cyclist; overtaking with full lane change not possible, parallel with oncoming vehicle |
Nine overtakes were excluded: eight when the cyclist was either standing still at the roadside or the GPS sensor had failed and showed a speed of 0 km/h, and one where another cyclist overtook a study participant.
The passing speed of the overtaking vehicle was set as the last speed registered by the radar (typically 3-10 m behind the cyclist). The duration for which each vehicle was registered by the radar was also extracted. Radar data were missing for 66 overtakes (8.4%), see Table 4 for a more detailed breakdown. This could happen when a vehicle was hidden by another vehicle, but in some cases no obvious explanation for the missing values could be identified.
Overtaking vehicles were categorised as either “free” or “following” depending on the time interval within which they passed the cyclist. In the latter case, the number of vehicles in the convoy and the position of each vehicle within the convoy was noted. The cut-off was set at five seconds, loosely based on Vogel (2002), who identified a time headway of six seconds as cut-off for “free vehicles” with respect to speed choice in an urban area. Given that here, the cyclist (carrying the measuring device) travelled forward as well, the time headway measured from the position of the bicycle overestimates the actual time headway between vehicles.
Overtake duration was operationalised as the duration for which the overtaking vehicle was registered by the lateral distance logger. This represents the time the vehicle spent next to the logger and disregards both the length of the cyclist and the time for the overtaking vehicle to change lanes to the left and back to the right. Overtake duration was only determined for the three confederate trucks.
Overtaking clearance estimates given by the cyclists were usually in half-metre steps. When a range was given (e. g. “two, two and a half metres”), this was coded as the mean value (2.25 m in the example). When the estimate was “a good two metres” or “almost two metres”, this was coded as 2.2 m or 1.8 m. Any verbal commentary by the cyclist was transcribed. The verbal comments on overtakes were sorted into four categories as described in Table 3.
| Classification | Inclusion criterion | |
|---|---|---|
| 1 | Very negative | Included phrases as: terrible, scary, way too close, inacceptable, etc. |
| 2 | Somewhat negative | Included phrases as: not great, a bit close, unfriendly, etc. |
| 3 | Somewhat positive | Included phrases as: okay, quite okay, okay with room for improvement, etc. |
| 4 | Very positive | Included phrases as: great, considerate, respectful, reassuring, comfortable, etc. |
3. Results
Of the 782 eligible overtakes, 175 (22.4%) were conducted by the confederate trucks. The distribution of overtakes across vehicle types, and descriptive statistics are shown in Table 4. The mean time behind the cyclist is counted from the moment the radar registered the vehicle, typically from 140 m behind the cyclist.
| Long truck | Medium truck | Short truck | Other heavy traffic | Passenger cars | Vans | Other | Total | |
|---|---|---|---|---|---|---|---|---|
| N (% of total) | 56 (7%) |
60 (8%) |
59 (7%) |
13 (2%) |
508 (65%) |
56 (7%) |
30 (4%) |
782 |
| Mean lateral clearance + std (cm) | 340±49 | 378±33 | 310±53 | 188±56 | 214±62 | 197±61 | 229±51 | 242±81 |
| 5th percentile (cm) | 257 | 330 | 230 | 94 | 126 | 118 | 125 | 130 |
| % Full lane change | 46% | 78% | 22% | 0% | 4% | 2% | 3% | 14% |
| N with radar data available | 52 | 55 | 52 | 11 | 470 | 48 | 28 | 716 |
| Mean passing speed + std (km/h) | 57.0±11.5 | 58.1±10.4 | 58.8±8.9 | 54.0±8.8 | 63.1±12.6 | 63.0±14.5 | 64.8±16.0 | 61.9±12.6 |
| % > 70 km/h | 23% | 18% | 24% | 17% | 34% | 45% | 30% | 32% |
| Mean time behind cyclist + std (s) | 22.8±15.1 | 22.0±10.8 | 23.8±14.0 | 15.2±3.0 | 13.1±6.2 | 13.0±6.4 | 10.1±6.4 | 15.2±9.3 |
In the following, vehicle types are grouped in different ways depending on the analyses made.
3.1. Cyclists’ perception of overtakes
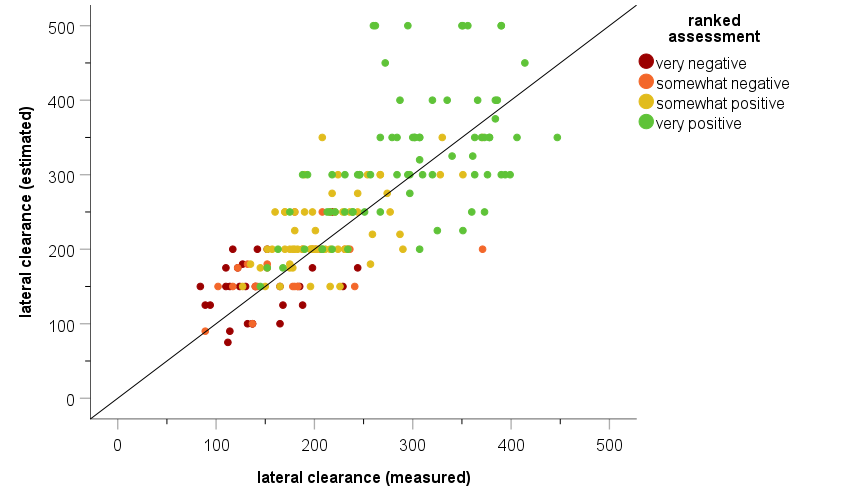
The cyclist participants made verbal comments on 433 overtakes and gave lateral clearance estimates for 280 overtakes across all vehicle types. On average, the absolute estimation error was 48 ± 42 cm (Figure 2). The clearance measurements and estimates correlated highly (r = .741, p < .001). A t-test showed that overtakes that were not commented upon were on average 20 cm narrower than those that were (t(780) = 3.5, p < .001). The frequency of ranks is presented in Table 5, alongside average clearance and passing speed per rank.
| Very negative | Somewhat negative | Somewhat positive | Very positive | |
|---|---|---|---|---|
| Ambient traffic (n = 303) |
13.5% | 17.2% | 35.0% | 34.3% |
| Lateral clearance (cm) | 147 ± 39 | 183 ± 62 | 217 ± 49 | 307 ± 68 |
| Passing speed (km/h) | 65.2 ± 14.6 | 62.2 ± 12.4 | 63.3 ± 12.3 | 60.3 ± 11.4 |
| Short truck (n = 40) |
5% | 2.5% | 12.5% | 80% |
| Medium truck (n = 45) |
0% | 0% | 6.7% | 93.3% |
| Long truck (n = 45) |
0% | 4.4% | 13.3% | 82.2% |
| TOTAL (n = 433) | 9.9% | 12.7% | 27.7% | 49.7% |
For the 433 commented overtakes, across all vehicle types, analyses of variance showed that the measured lateral clearance differed with comment rank (F(3, 429) = 142.4, p < .001; significant differences between all levels). The mean passing speed was significantly higher for the very negatively ranked overtakes than for the very positively ranked overtakes (F(3, 394) = 2.8, p = .040). For the 71 overtakes conducted with a full lane change, the level of ranked verbal comments did not differ between the three truck types and ambient traffic (chi-square(6) = 7.5, p = .281).
In addition to lateral clearance and passing speed, which were the main topics commented upon by the cyclist participants, the factors listed below were stated as contributing to how an overtake feels:
The use of indicators was mentioned as a sign of having been acknowledged and considered, and it was commented upon that almost no-one other than the truck drivers used the indicators. Turbulence caused by the overtaking vehicle, and especially the absence of turbulence when being overtaken with a large clearance, were mentioned frequently. Cyclists commented on the effect of overtaking and oncoming large vehicles in sidewind, stating that it could lead to problems while the vehicle was parallel with the cyclist and afterwards, if there were following vehicles. The overtaking drivers’ behaviour in relation to the presence or absence of oncoming traffic was thematised, too. Overtaking when oncoming traffic was close was seen as problematic, both with respect to one’s own safety and for the oncoming vehicle. Some participants also made general statements of whether the manoeuvre felt “calm” or “stressed” and remarked upon overtaking drivers disregarding the solid centre line or using turning lanes or other restricted areas.
3.2. Cyclist lateral position
In 402 cases, the cyclists rode in the lane during the overtake, in 296 cases they used the shoulder, and in 84 cases they shifted position during the overtake. Cyclists varied in their personal choice of lateral position from 100% in the lane to 94% on the shoulder. Some cyclists commented on their lateral position, either as a strategic choice (“I usually avoid the shoulder, you never know what is going to surprise you there”, or “nice, new asphalt in the lane, I’d like to ride there, but of course I don’t do that”), or as a local adaptation to the circumstances (“the shoulder looks clean and the surface is good here, so I’ll use it here”). The average cycling speed during an overtake in the lane was 29.8 km/h ± 6.9 km/h, on the shoulder it was significantly lower at 26.9 km/h ± 6.1 km/h (t = 5.8, p < .001). A chi-square test showed that in this study, cyclists were less likely to ride on the shoulder when overtaken by a truck than by a light vehicle (chi-square = 4.35, p = .037).
Analyses of variance with the factors light/heavy vehicle and cyclist in lane/on shoulder showed that the vehicle type had a significant effect on the mean lateral overtaking distance (F(1, 694) = 429.1, p < .001), the mean overtaking speed (F(1, 633) = 26.3, p < .001), and the mean time the vehicle spent waiting behind the cyclist (F(1, 633) = 121.3, p < .001; Table 6). When the cyclist was in the lane, overtaking distances showed a trend to be larger (F(1, 694) = 3.6, p = .058) and overtaking speeds were higher (F(1, 633) = 4.2, p = .041). The duration behind the cyclist was not affected by the cyclist’s lateral position (F(1, 633) = 0.76, p = .384). No interaction effects were found.
| Indicator, unit | Overtaken by light vehicle | Overtaken by heavy vehicle | ||
|---|---|---|---|---|
| In lane | On shoulder | In lane | On shoulder | |
| Lateral clearance (mean), cm | 217 ± 63 | 209 ± 61 | 339 ± 49 | 326 ± 84 |
| Lateral clearance (5th perc.), cm | 126 | 132 | 248 | 157 |
| % clearance > 250 cm | 29% | 20% | 95% | 79% |
| % full lane change | 4% | 3% | 45% | 47% |
| Vehicle speed (mean), km/h | 64 ± 12 | 63 ± 14 | 59 ± 10 | 55 ± 11 |
| Vehicle speed (95th perc.), km/h | 82 | 84 | 74 | 74 |
| Duration behind (mean), s | 13 ± 6 | 13 ± 7 | 23 ± 14 | 22 ± 13 |
| Duration behind (95th perc.), s | 25 | 23 | 49 | 53 |
3.3. Choice to overtake
During the approach phase, the driver must consider the sight distance, oncoming traffic, traffic ahead, the cyclist’s lateral position and speed, the dimensions and speed of their own vehicle and potentially additional factors to come to the decision whether to overtake or not, and how to act during the time leading up to the manoeuvre.
3.3.1. Visibility
The visibility determines how far ahead the driver can ascertain that the oncoming lane is free. Visibility could not be measured directly. Figure 3 maps the locations of all eastbound overtakes. The left panel indicates where drivers overtook with larger lateral clearances, which can be indicative of better visibility. Segments with many wide respectively narrow overtakes are almost exclusive of each other.

3.3.2. Oncoming traffic
In more than half of the overtakes, no oncoming traffic was present. With oncoming traffic, drivers must decide whether to pass anyway or to wait behind the cyclist. The confederate truck drivers passed in three cases when oncoming traffic was close or at a medium distance (Table 7). In one “close” case, a turning lane was used for overtaking (lateral clearance 396 cm), in the other case the cyclist was on the shoulder which was wider at that point (lateral clearance 230 cm). In the “medium” case (lateral clearance 284 cm) the cyclist commented: “and even though this car was there he managed the overtake well, went back to the right a bit quickly due to the oncoming car, but it felt okay”. The confederate truck drivers overtook less often with oncoming traffic at medium or close distance than drivers of ambient traffic did (chi-square(3) = 26.6, p < .001).
| None | Just passed | Far | Medium | Close | Total | |
|---|---|---|---|---|---|---|
| Ambient | 354 (58%) | 91 (15%) | 62 (10%) | 53 (9%) | 47 (8%) | 607 |
| Short | 37 | 14 | 7 | 0 | 1 | 59 |
| Medium | 40 | 14 | 4 | 1 | 1 | 60 |
| Long | 40 | 9 | 7 | 0 | 0 | 56 |
| Total truck | 117 (67%) | 37 (21%) | 18 (10%) | 1 (1%) | 2 (1%) | 175 |
| TOTAL | 471 | 128 | 80 | 54 | 49 | 782 |
In 43.6 percent of the cases, the confederate trucks were registered for at least 20 s (corresponding to a delay of 10-12 seconds). For ambient traffic this occurred in 6.8 percent of the cases. Delays of a minute or more were logged three times for the confederate trucks and once for ambient traffic.
3.4. Determinants of overtake characteristics
Once the driver decides to overtake, situational and subjective factors influence how the following three phases (steering away, passing and returning) are performed. Here, the truck drivers had specific instructions to consider.
3.4.1. Oncoming traffic
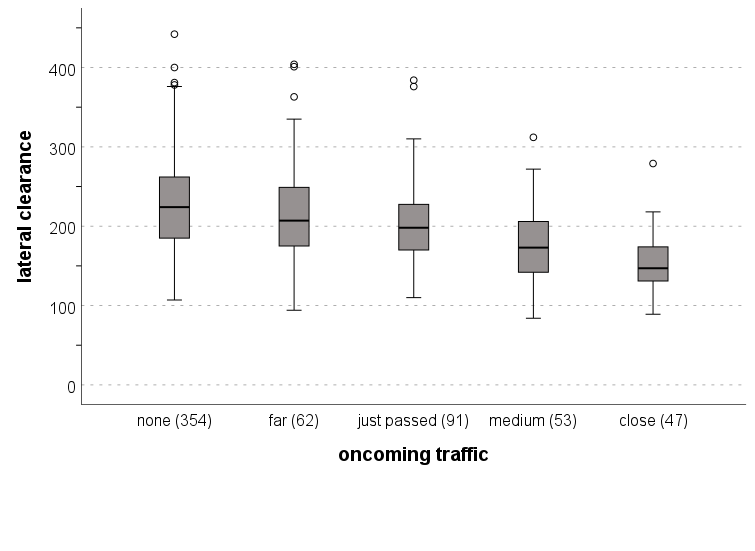
Due to the potential bias from instructions, the confederate trucks were excluded from the analysis of how oncoming traffic impacted lateral clearance. A multivariate ANOVA (clearance, speed, duration behind) for ambient traffic showed that the lateral clearance depended on oncoming traffic (F(4, 550) = 21.7, p < .001). Bonferroni-corrected post-hoc tests showed that all differences were significant except those with immediately neighbouring categories (Figure 4). However, as the figure shows, also in cases without any oncoming traffic present, the lateral clearance had a wide distribution, with the 5th percentile clearance for ambient traffic being 134 cm. Mean passing speed did not vary (F(4, 550) = 0.88, p = 0.477). The duration (including approach) ambient traffic spent behind the cyclist was significantly longer (14.8 s) when overtaking after oncoming traffic had just passed than in any other case (12.8 s; F(4, 550) = 3.4 p = .009).
3.4.2. Duration of overtake
The cyclists’ average speed during the overtakes was 28.6 ± 6.9 km/h. The overtake durations measured for the three confederate trucks (Figure 5) were often longer than the computed duration for 70 km/h, because the trucks often drove at a slower speed. In those cases where the dots are below the respective curve, the truck exceeded the speed limit.
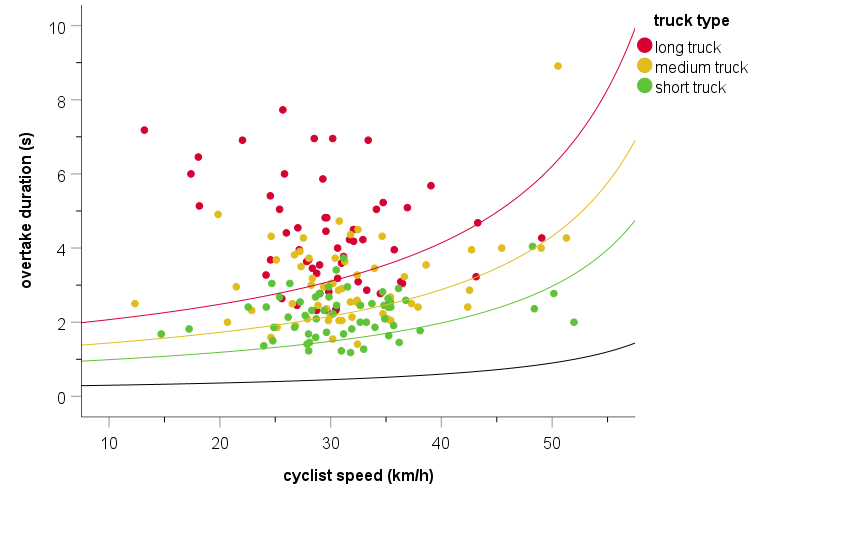
Overtake duration and speed affect the distance the truck needs to travel in the oncoming lane. In 20 percent of the overtakes, the long truck drove 78 m or more in parallel with the cyclist, excluding the distance needed to change into and out of the oncoming lane.
3.4.3. Following vehicles
In 158 out of 175 cases the confederate trucks were neither following nor followed by another vehicle (“free”). In 16 cases, the truck was in the first position of a queue, in one case the truck was following another truck.
All trucks overtook with a clearance above the median for ambient traffic (206 cm). An analysis of variance with the factor convoy position showed that there was a significant effect on clearance for vehicles following a truck (F(4, 190) = 16.9, p < .001; Figure 6). Bonferroni-corrected post-hoc tests were analysed up to third position. The lateral clearance for free trucks and trucks in the first position did not differ, whereas they differed significantly for all other comparisons except between first and third positions.
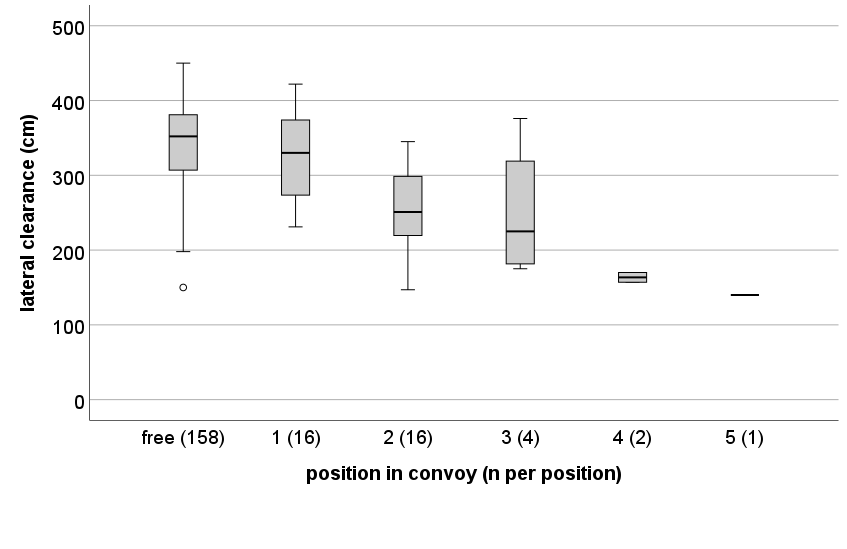
One-sided one-sample t-tests were conducted, comparing the mean values per position against the median for ambient traffic. The overtaking clearances lay significantly above the median both for confederate trucks (free and in first position, t(157) = 32.8, t(15) = 7.6, both p < .001), and for vehicles in second position (t(14) = 3.1, p = .004). The clearance for vehicles in the third position did not significantly differ from the median (t(3) = .96, p = .204).
For ambient traffic, there were 406 free vehicles (neither followed nor following). Of the 201 who were not free, 93 were in the first position of a convoy, the remaining ones were followers.
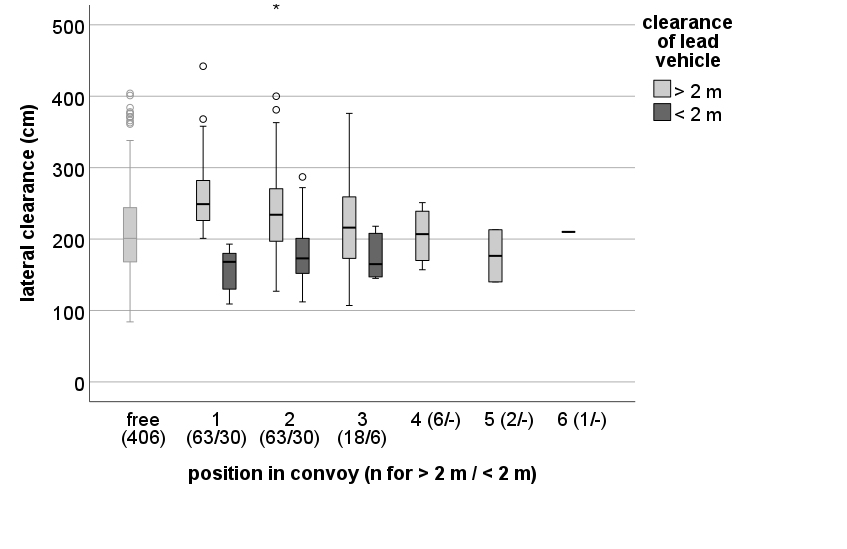
Ambient traffic was grouped into free vehicles, convoys where the lead vehicle had a clearance of above 2 m (approximately the median) and convoys where the lead vehicle had a clearance of below 2 m. An analysis of variance for the non-free vehicles considering the main effect of “position in convoy” and its interaction effect with clearance of the first vehicle showed no main effect (F(5, 171) = .45, p = .812), but a significant interaction (F(3, 171) = 28.1, p < .001). As visible from Figure 7, farther back in the queue the influence of the lead vehicle clearance diminishes. One-sided one-sample t-tests against the median of free vehicles showed that for convoys the clearance of the lead vehicle and clearance in the second position differed significantly from the median, as did the clearance for the third position in convoys where the lead vehicle clearance was < 2 m.
The duration spent behind the cyclist did not affect the lateral clearance for any truck type and for ambient traffic (all r < |.06|, .702 < p < .958).
3.5. Questionnaire
On a scale from 0 (not at all) to 10 (absolutely) the cyclists responded feeling safe (9.1) on the road section, not affected by pressing the button (1.0), and that they were cycling as they would have when not in a study (9.5). Additional verbal comments included that they were familiar with this or similar roads (five participants) and that the truck drivers overtook considerately (twelve participants). Three participants commented that also other drivers kept good clearance, whereas three others stated that truck drivers both here and in general tend to drive better than passenger car drivers. Other factors mentioned were the good visibility, the relatively low traffic volume and the width of the road as well as favourable ambient conditions. Most participants confirmed also verbally that they had been cycling as usual, one said that they felt safer than usual knowing that the truck drivers would take care, one stated that they were more self-aware, and another said they were riding on the shoulder slightly more than usual.
Asked how they felt about the LCVs compared with other trucks, most of the participants said that the length in itself was not a problem, if the speed and clearance were appropriate. The resulting lack of turbulence and flying debris was mentioned frequently. The participants commented unanimously that adverse situational conditions would make the experience worse or would keep them from cycling.
Asked whether any general regulations for overtakes should be implemented, 18 out of 19 participants mentioned a prescribed clearance, either as absolute value, ranging from 1.5 to two metres, or relative to the road, with half or the whole vehicle in the oncoming lane. Additionally, speed reduction (5 participants) and the usage of indicators (4 participants) were mentioned. Free sight and no overtakes with oncoming traffic present were other suggested requirements. Most participants did not see any need for additional regulations for trucks or LCVs, though two people motivated stricter regulations with the larger turbulences.
4. Discussion
With its somewhat exploratory character, this study provides insights into partially naturalistic overtaking behaviour on a Swedish road, on how cyclists perceive overtakes with heavy vehicles whose drivers follow specific instructions, and how these overtakes impact surrounding traffic.
The distribution of lateral clearances of ambient traffic corresponds roughly to the results from Dozza et al. (2016), the only other study available so far from a Swedish rural road. Compared with the extensive dataset of Nolan et al. (2021), mostly collected on urban and suburban Australian roads, the clearances measured here are larger. They are also larger than what Walker (2007) found for various roads in the UK, and are roughly comparable to Llorca et al. (2017) for rural roads in Spain.
As in Dozza et al. (2016), passing speed and clearance were independent of each other, and passing speed was on average below the posted speed limit. The percentage of speeding while overtaking was with one third of all vehicles below the estimated average speeding share for Swedish roads with a speed limit of 70 km/h (European Transport Safety Council, 2019). This can be explained by the fact that around a third of the vehicles logged here may have reduced their speed due to oncoming traffic.
The overtaking behaviour of the three confederate truck drivers differed clearly from the ambient traffic in that they kept a larger lateral clearance and waited longer behind the cyclists. It was an ethical requirement for the study that confederate drivers must perform a full lane change. On the one hand, this made the situation less realistic, which was also commented upon by several of the cyclists. On the other hand, it provided an opportunity to evaluate whether close to ideal overtakes with trucks would be acceptable for experienced cyclists in realistic traffic conditions. As ambient traffic could not be controlled, cyclists could compare the confederate drivers’ behaviour with ambient traffic. The behaviour of ambient traffic around the confederate trucks could also be analysed.
The first research question was concerned with the cyclists’ perception of the overtakes. Due to the small share of ambient traffic conducting full lane change overtakes, it was not possible to compare trucks and ambient traffic behaving similarly. It was evident from the ratings, the verbal comments while cycling, the interviews after the ride and the questionnaire that the study participants considered overtakes with the confederate trucks, including the LCV, to be unproblematic, provided the clearance was large, the speed appropriate, and the indicators were used. While not much other heavy traffic was present, the cyclists compared with their previous experience when commenting on the absence of turbulence and flying debris, and when describing the feeling of being respected as a road user.
Overall, the cyclists’ perception of overtakes was mainly influenced by clearance and the speed of the overtaking vehicle, which is consistent with the literature (Kircher et al., 2025; Llorca et al., 2017). Overtaking in the presence of oncoming traffic can be uncomfortable due to the resulting lower clearance, but also psychologically, because it is taken as a manifestation of disrespect. Being respected was also linked to turn indicator usage, decelerating and waiting for a suitable opportunity to overtake, and to other signs showing that drivers had seen and acknowledged the cyclist.
The decision to overtake or to wait sets the preconditions for how the actual overtake can be performed. This is also related to surrounding traffic. For this reason, the second and third research questions are discussed together. When an overtake is initiated with oncoming traffic present, the available lateral space is limited, which inevitably leads to a small lateral clearance. Limited visibility has the same effect, as oncoming traffic might appear suddenly.
To a much larger extent than ambient traffic, the confederate drivers refrained from overtaking when oncoming traffic was at a close or medium distance, possibly due to the instructions or because there was no space for trucks to attempt this manoeuvre. This, combined with the gap size required led to trucks, and traffic following the trucks, waiting longer behind cyclists for a suitable opportunity to pass. The gap size is a special concern for longer vehicles in an overtaking situation. In addition to the time spent in parallel with the cyclist, and therefore in the oncoming lane, the margins needed for lane changes are larger. At higher speeds this can add up to substantial distances: For a cyclist speed of 30 km/h and a truck speed of 70 km/h, and an assumed steering-away and returning duration of together around 4 seconds (Dozza, 2020), the resulting distance for which the oncoming lane is occupied is ca. 140 metres. This becomes longer if the truck needs to accelerate and is loaded. Oncoming traffic can be expected to travel at a similar speed, therefore more than twice the distance must be visible and free from traffic. Traffic volume and visibility are the two most important parameters influencing the chances to overtake especially for longer vehicles (Tapani, 2005). Sandin et al. (2012) found that car drivers’ overtaking manouvres of trucks were affected not only by vehicle length but also the traffic volume and road width. Thus, the absolute delays found here are specific for the test location, but the relation between longer and shorter vehicles is likely generalisable.
If the manoeuvre is initiated with a sufficiently long gap in oncoming traffic, the overtaking driver has the option to make a full lane change. While the average clearance indeed was largest with no oncoming traffic present, it still happened that drivers overtook with clearances of around 1 m. Countermeasures should therefore not only prevent inappropriate overtakes, but also ensure a reassuring clearance in situations where preconditions for conducting an overtake are good.
The confederate truck drivers, even though instructed to perform a full lane change when overtaking, only did so in around half of the cases. This indicates that rules can work to some extent, but it also shows that additional measures are required to guarantee appropriate overtakes on all occasions.
While it is non-controversial in principle that others’ safety must be considered (e. g. Chapter 2, 1 §, in the Swedish traffic regulation), and that the needs of the more vulnerable in the constellation are of special concern, road rage (Bjureberg & Gross, 2021), driver anger (Deffenbacher et al., 2016) and driver aggression (Björklund, 2008) are real and can have serious consequences. Fruhen and Flin (2015) showed that a negative attitude towards cyclists was associated with more aggressive driving behaviour towards cyclists. Being part of a queue has the potential to cause stress (Lucas-Alba et al., 2020), which is associated with driver anger (Love et al., 2023; Precht et al., 2017).
When overtaking passenger cars, lateral space limitations usually require the oncoming lane to be free. However, when overtaking cyclists, some drivers pass in the presence of oncoming traffic. This, as shown here and previously by others (e. g. Chapman & Noyce, 2014; Dozza et al., 2016; Kay et al., 2014; Llorca et al., 2017), leads to consistently smaller clearances and is perceived as uncomfortable by cyclists. However, longer waiting time was not linked to smaller lateral clearances. Rather, the clearance chosen by the lead vehicle driver affected the followers’ clearance with dissipating strength. This needs to be investigated for other road types, with more data and for situations with longer convoys. If the effect is confirmed, it underlines the importance of full lane changes when overtaking especially with trucks, in addition to the direct effects of the truck on the cyclist. Trucks are likely to be followed by other vehicles whose clearance they influence. Also, in case of a close pass, the aerodynamic effects in the rear of the truck may pull the cyclist into the lane, at the same time as following vehicles are more likely to pass closely, increasing the risk of the cyclist getting hit.
Current Swedish traffic regulations can be interpreted as requiring the cyclist to generally use the shoulder (Chapter 3, 7 §), even though this is conditioned on “sufficient width and suitability” of the shoulder. The present data show that in around half of the cases, the cyclists rode on the ca. 0.75 m wide shoulder. In a recent simulator study, less experienced cyclists almost exclusively used the shoulder (Kircher et al., 2024), motivating their choice with not wanting to be in the way of motor vehicles. However, this lateral position actually tended to lead to narrower clearances on average, which may appear counterintuitive and does not align with results from Kay et al. (2014). An explanation for our results may be that motorists perceive their lane as free when the cyclist is on the shoulder, whereas a cyclist in the same lane is more likely to be treated as a vehicle to be passed with a proper overtake. A more controlled investigation is required to exclude other factors, and also to resolve the conflict with the results from Kay et al. (2014). If true, recommended shoulder widths and rules for lateral placement of cyclists should be revisited to ensure that cyclists’ safety and comfort is prioritised.
4.1. Limitations and future research
The data collection is limited with respect to location, the number and sample characteristics of the cyclists, and the number of overtakes, especially when broken down into subgroups. The cyclists described the orchestrated behaviour of the truck drivers as unrealistic, and the presence of other heavy traffic was low. Therefore, the generalisability of some of the results is limited.
The truck drivers’ behaviour differed noticeably, such that the physical features of the vehicles could not be compared without confounding them with the driving style. The driver of the short truck frequently overtook with less than full lane change, which affected the cyclists’ judgements. This also indicates that clear-cut instructions on how to overtake, in a setting without time pressure and with the sole purpose of overtaking cyclists in a prescribed manner, are not enough to reliably produce the desired behaviour.
All the cyclists in the study had extensive experience of riding on rural roads. Less experienced cyclists need larger margins (Kircher et al., 2024), such that the results cannot be generalised to all cyclists and certainly not to people who do not cycle yet.
The situational conditions during the study were favourable with low winds, sunshine and mostly good visibility, such that concessions need to be made for inclement weather and other aggravating factors.
More data from real traffic in different locations with different traffic densities are needed for extended and more detailed analyses of the time spent behind cyclists and other “slow-moving” traffic in relation to gap availability and acceptance, and to further study the behaviour of followers depending on lead vehicle behaviour.
When assessing the three latter phases in overtaking behaviour, this should be conditioned on the overtaking decision made in the approach phase. A small clearance resulting from a decision to overtake in the presence of oncoming traffic can be different from a small clearance without oncoming traffic and might need different countermeasures.
Specifically relating to heavy vehicles including LCVs, more research is needed into effects of side wind on cyclist safety when passing as either overtaking or oncoming traffic.
5. Conclusions
Several aspects must be considered when introducing LCVs to rural roads used by several road user types: a) The direct effects on cyclists and other traffic moving slower than the posted speed limit and what these mean for bikeability, b) how these road users affect the trucks, and c) how other motorised traffic is affected by and affects these interactions. This also needs to be evaluated with respect to the absolute number of trucks present, which could be inversely related to the share of LCVs in heavy traffic. Additional evaluations including less experienced cyclists and potential cyclists should be carried out.
The present findings suggest that experienced cyclists are comfortable with LCVs overtaking them, provided this is done with a full lane change, indicator usage, and possibly a speed adaptation and further precautions, depending on the circumstances. However, especially as following traffic emulates the clearances to some extent, narrow overtakes with large vehicles can lead to dangerous “chain reactions”. Therefore, it is important to clearly regulate how cyclists should be overtaken. Past and present findings suggest that these requirements should include all motorised traffic.
Acknowledgement
We would like to thank the participating truck drivers and cyclists for contributing with their time, our colleague Jakub Sliačan for support with the data analysis, and the reviewer for helpful input on a previous version of the manuscript. An earlier version of this work was presented orally at the HFES conference (Bologna, 2025).
CRediT contribution
Katja Kircher: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Resources, Software, Supervision, Visualization, Writing—original draft, Writing—review & editing. Jesper Sandin: Conceptualization, Funding acquisition, Investigation, Project administration, Resources, Writing—review & editing.
Declaration of competing interests
The authors report no competing interests.
Declaration of generative AI use in writing
The authors declare that no generative AI was used in this work.
Ethics statement
The methods for data collection in the present study have been approved by Swedish Ethical Review Authority (Decision 2024-00908-01).
Funding
This research was funded by the Swedish Energy Agency (grant 2021-012492) and the Swedish Transport Administration (grant 2024/66799.
Editorial information
Handling editor: Stijn Daniels, Transport & Mobility Leuven | KU Leuven, Belgium
Reviewer: António Lobo, University of Porto, Portugal