Come together: an exploration on social driving behaviour of automated vehicles
Abstract
Interaction between road users is a fundamental part of the traffic system. The advent of automated vehicles (AVs) has given rise to requirements for interactions between AVs and other road users, expressed in high-level terms like ‘demonstrate anticipatory behaviour’, ‘not confusing other road users’, and ‘being predictable and manageable for other road users’. Operationalizing these social driving behaviours requires social science knowledge on human interaction. However, translating social driving behaviour requirements unambiguously to the engineering domain necessitates that social scientists have a rudimentary understanding of the language of engineers (and vice versa). The present study seeks to accommodate interdisciplinary collaboration between social scientists and engineers by providing insight into current AV technological capabilities with regards to social driving behaviour and road safety, and their development in the near future. To this end, an exploratory interview study was performed with 7 engineers with backgrounds in industry, academia, research institutes, and/or vehicle authorities. The engineers provided several real-world examples of implications of AV algorithms on social driving behaviour. Thematic analysis of the interview transcripts resulted in clusters of themes relating to the product development process: requirements (i.e., societal, legal, customers), development (i.e., process, implementation), and evaluation (i.e., assessment, monitoring). Choices made in each of these phases appear to influence the final behaviour of automated vehicles in traffic. Knowledge on social driving behaviour and its impact on traffic safety can guide these choices to ensure safe operation of AVs within the social environment of traffic.
1. Introduction
The advent of automated vehicles (SAE level 3+) is predicted to change transportation on a global scale (Elvik, 2020; Hoogendoorn et al., 2014). The rapid improvements made to (semi-)automated vehicles and towards fully automated vehicles (AVs) are made possible due to technological and engineering solutions. These solutions could enable vehicles to travel from A to B autonomously. However, being a part of the traffic system requires more than the ability to control a vehicle; it also requires interaction with other road users, including vulnerable road users (VRUs) such as bicyclists and pedestrians, and human driven vehicles (Grahn et al., 2020; Markkula et al., 2020; Straub & Schaefer, 2019). These interactions between road users are based on formal regulations such as ‘yielding to traffic coming from the right’ (the rules of the road), but also on informal regulations based on societal norms and values, such as drivers voluntarily giving way to VRUs beyond their obligations. Drivers also use subtle cues to make clear what their intentions are to other road users such as timely and gradually slowing down when nearing a crosswalk to indicate to pedestrians they can cross the road safely. This social aspect of driving is a crucial element that is not always present in current automated driving solutions, whether in production vehicles or proposed in the literature (Brown & Laurier, 2017; Negash & Yang, 2023; Villadsen et al., 2023). The importance of the human and social aspects of driving for automated vehicles are being acknowledged by legislative bodies. For example, regulations on automated lane keeping systems (UNECE 2021) state that “the system shall aim to keep the vehicle in a stable lateral position inside the lane of travel to avoid confusing other road users” and regulations on advanced driver assistance steering systems (UNECE 2025) state that “A lane change procedure shall be predictable and manageable for other road users.”. However, which variations in lane position would actually confuse other road users and what constitutes a predictable and manageable lane change is still under discussion. The further development and specification of these requirements necessitates insight in human behaviours. Such insight is often the domain of the so-called ‘social sciences’ (i.e., psychology, sociology, linguistics, and other disciplines with a focus on human cognition, interaction and communication), but it is not always readily available or usable to other domains. Collaboration is therefore needed between social scientists and engineers to develop AVs that integrate seamlessly into a traffic system where social dynamics are crucial for managing and preventing conflicts. Yet, this collaboration comes with challenges (Jones & Jones, 2016; Lowe et al., 2013), and differences between the two fields create a so-called ‘epistemological gap’ both in terms of knowledge and approaches Hadfield-Hill et al. (2020). The aim of this study is to reduce this gap, by identifying the challenges engineers face when developing social aspects of AV driving behaviour and highlighting how social scientists can contribute.
1.1. Research question & approach
This study addresses the following research question: How can social scientists use their knowledge to improve social driving behaviour of automated vehicles?
Understanding the hurdles to implementing social behaviour in AVs is essential for integrating social science knowledge into the development of social driving behaviour. Therefore seven engineers working in the field of AV perception and decision making were interviewed about their insights in the development of algorithms and requirements for AVs regarding social driving behaviour. To convey these insights effectively to social scientists a strong focus was put on obtaining examples of related real-world behaviours. Such examples help bridge the gap between the obtained engineering insights and the perspective of social scientists, by creating a point of congruence (Hadfield-Hill et al., 2020). Furthermore the focus of this exploratory study was on getting a wide range of engineering insights, rather than interviewing a homogeneous group of participants. We first present the identified themes that arose during the interviews, each accompanied with the previously mentioned related real-world examples. We then use these results to explore how social scientists can apply their expertise to improve social driving behaviour of AVs.
2. Background
The perceived relevance of social sciences for automative engineering has been increasing, especially in research focusing on the vehicle interior. Multiple standards, e.g., ISO 9241-210:2019 (ISO, 2019), were developed to provide requirements and recommendations for human centred HMI designs. More recently there has been a growing interest in the interactions between road users, especially when AVs are part of the interaction (e.g., Brown & Laurier, 2017; Knoop et al., 2019; Madigan et al., 2019).
Previous work (e.g., Grahn et al., 2020) investigated how human drivers enable safe driving within the social environment on the road. Transferring these skills from human drivers to automated driving results in AVs that are more seamlessly integrated into the social traffic system, likely improving safety and efficiency as a result (Straub & Schaefer, 2019).
2.1. Different approaches
The approach to investigating the interactions between human drivers and AVs appears to differ substantially between engineers and social scientists. An engineering perspective requires well-defined descriptions of the behaviour that needs to be performed, and when to perform this behaviour or when not to. Engineering studies often aim to provide an approach to solving the described interaction, often in the form of an algorithm or set approach. Defining human behaviour into a more precise, often mathematical description results into what is also known as a behavioural specification (Bin-Nun et al., 2022). These behavioural specifications define intended behaviour in a way that AVs can implement, similar to how traffic laws guide human drivers. Traffic laws, written from a social science perspective, allow for driver judgment and adaptation based on the circumstances, often using broad terms like “when safe” or “when appropriate.” In contrast, behavioural specifications follow a precise, mathematical approach, reflecting the differing perspectives of social scientists and engineers.
A clear example of differing perspectives is an AV approaching a pedestrian crossing. Engineers require precise braking parameters to achieve socially desirable interactions (e.g., Lee et al., 2017). Social science research on pedestrian crossings offers valuable insights (e.g., Beggiato et al., 2018; Razmi Rad et al., 2020; Tian et al., 2023), but lacks the detail needed for direct implementation, creating a gap between knowledge and engineering application.
2.2. Social driving behaviour
In a broad context, Schmitt (1998) defines social behaviour as: “a person’s behaviour is social when its causes or effects include the behaviour of others”. It is important to note that this definition is ‘value free’, meaning that social behaviour as defined by Schmitt could manifest as pro-social and anti-social behaviour. An example of pro-social behaviour in a driving context is the granting of right-of-way for another driver even if not required to do so by law, while an anti-social example could be cutting in front of another driver. Some aspects of social behaviour can be considered as intended behaviours while there are also behaviours that influence others without the intention to do so. An example of intended social behaviour in a driving context is the use of vehicle indicators to communicate a desire to change lanes to other road users. An example of unintended behaviour that influences others could be the braking pattern of a vehicle. Even if the braking pattern is solely chosen to brake at a set position it still communicates information about intent and future position to other road users, whose state, behaviour and goals could be influenced by it. For example, braking early and gradually for a pedestrian crossing also communicates the intent to stop to any waiting pedestrians, while braking late and suddenly could be interpreted by waiting pedestrians as unwillingness to stop or a failure to notice them (Tian et al., 2023). Additionally, not accounting for unexpected braking patterns may result in rear end crashes (Favarò et al., 2017). Therefore, unintended influences of AV behaviour should be taken into account when developing AVs. Other examples of unintended consequences of AV behaviour are slow driving and the adoption of a large following distance causing frustration in other drivers resulting in dangerous manoeuvres (Knoop et al., 2019) and the miscommunication in merging scenarios due to unusually large gaps left by an AV (Brown & Laurier, 2017). Aspects of social behaviour can be proactive or reactive, with proactive behaviours occurring as anticipation to situation that has not manifested yet (e.g., moving to the right-most lane early on the highway in preparation for an upcoming offramp or slowing down further when in a school zone around the time schools end) and reactive behaviours only occurring when a situation presents itself (e.g., braking in response to another vehicle using indicator lights).
Based on the above, a preliminary value-free definition of social driving behaviour was prepared for the interview study that attempts to unite both engineering and social scientist perspectives. We define social driving behaviour as: driving behaviour that directly or indirectly influences and/or takes into account other road users, e.g. their state, behaviour and goals.
2.3. Primer on AV design
A condensed description of AV design follows to facilitate a basic understanding of the engineering perspective on social driving behaviour.
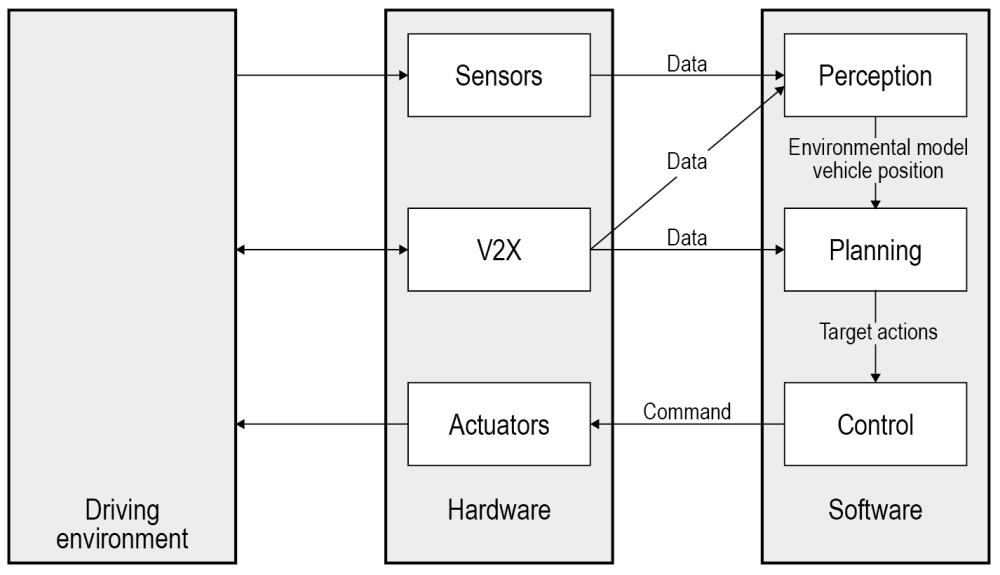
According to Pendleton et al. (2017), AVs interact with the driving environment through hardware, involving sensors (e.g., radar), actuators (e.g., a steering system), as well as communication with other vehicles or infrastructure (e.g., vehicle-to-Everything, V2X), see Figure 1. Within the software realm, Pendleton et al. (2017) discerns three subsystems: perception, planning, and control. Algorithms in the perception subsystem make use of sensor and V2X data to perceive and recognize objects in the environment as well as the ego vehicle’s state (e.g. the own speed). For example, a radar sensor may report distances to objects, as well as changes in these distances, while the algorithms translate this data into specific other road users or objects and their states and characteristics. One step further, these algorithms can also predict possible future states of surrounding objects. Consequently, a model of the vehicle position in relation to its environment is created. Next, the planning subsystem uses this information and plans target actions for the vehicle. The planning subsystem utilizes a number of factors to determine what target actions to take. This is done by a so called ‘cost function’: a mathematical formula that combines a number of different factors with weights to provide a ‘cost’ for each option in a set of candidate target actions. The higher the ‘cost’, the less desirable that specific candidate action becomes. Factors could relate to for example travel time; comfort of the driver; fuel efficiency; safety. By optimizing for the lowest cost (or highest benefit), these factors and their weights help a vehicle determine what decision to make and what to avoid. Different types of ‘planners’ are described by Pendleton et al. (2017), reminiscent of Michon’s (1985) hierarchical levels of driving: the mission planner determines, e.g., that the vehicle drives from A to B, whereas the behavioural planner determines, e.g., when to perform an overtaking manoeuvre, and the motion planner determines the exact desired motion path, including positions and velocities at each time step. Finally, execution of the motion path takes place in the control subsystem. The implementation of these functions may differ between vehicles and manufacturers.
3. Method
A semi-structured interview study was conducted to gain insight into current AV technological capabilities with regards to social driving behaviour and road safety, and their development in the near future. A thematic analysis (Braun & Clarke, 2006) was performed on the interview results.
3.1. Participants
Prospective participants were identified through web search (and follow-up inquiries within the resulting companies and institutes) and connections within the network of the authors. They were subsequently selected based on their experience with the development of AVs (e.g., based on published papers). A total of 12 prospective participants were contacted directly through an e-mail, which detailed the purpose of the study and the request to participate in an interview. Seven of them (all males, age range 35-49 years, M = 41.8, SD = 4.8) replied positively and agreed to participate anonymously, covering backgrounds ranging from academia and research institutes to automotive industry and vehicle authorities (see Table 1). At the time of the interview, participants were working across three European countries (Germany, Netherlands, Sweden), with backgrounds within and outside Europe. Experience across the participants included object detection, object tracking, object path prediction, motion planning, decision making, safe driving policies, safety acceptance criteria, modelling human driving behaviour, and cooperation between AVs and infrastructure, pedestrians, and conventional vehicles. Ethical approval for this study was obtained from the SWOV ethics committee.
| Pp | Role | Aca | Ind | Res | Pp |
| 1 | Employee automotive supplier of AV software | X | 1 | ||
| 2 | Assistant professor computer vision and perception (previously: robotaxi company) | X | (X) | 2 | |
| 3 | Associate professor computer vision, perception and prediction (previously: automotive company) | X | (X) | 3 | |
| 4 | Leader of the group for cooperative system automation and integration | X | 4 | ||
| 5 | Chief inspector | 5 | |||
| 6 | Research scientist and manager AV behaviour and motion planning | (X) | X | 6 | |
| 7 | Assistant professor / Senior research scientist AV safe and social interactions | X | X | 7 |
3.2. Materials
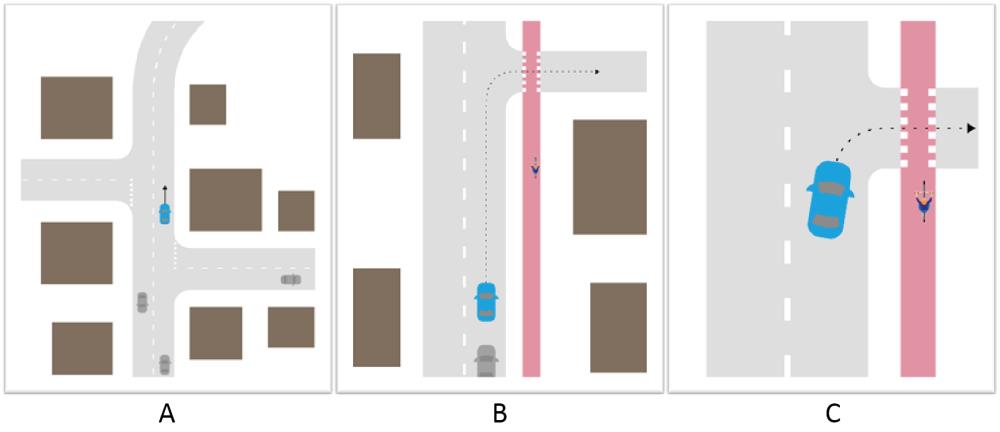
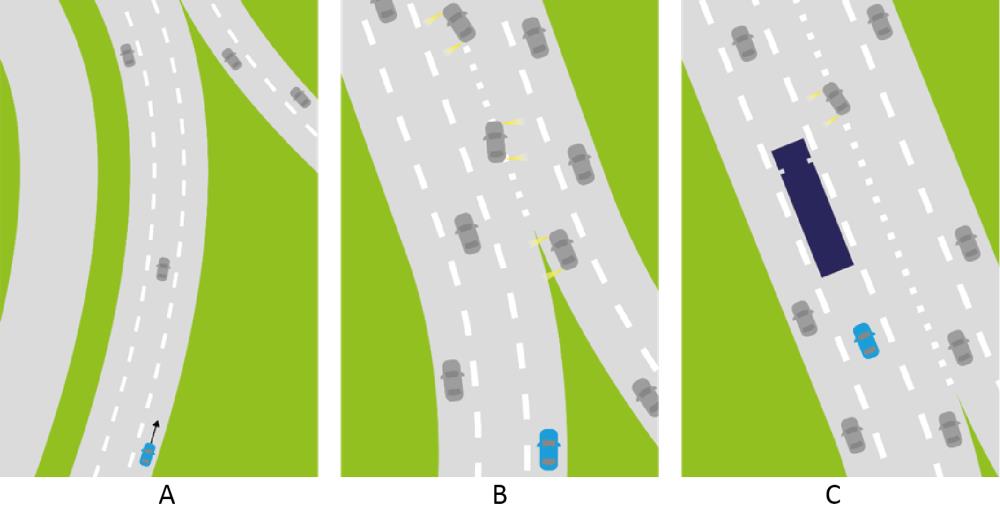
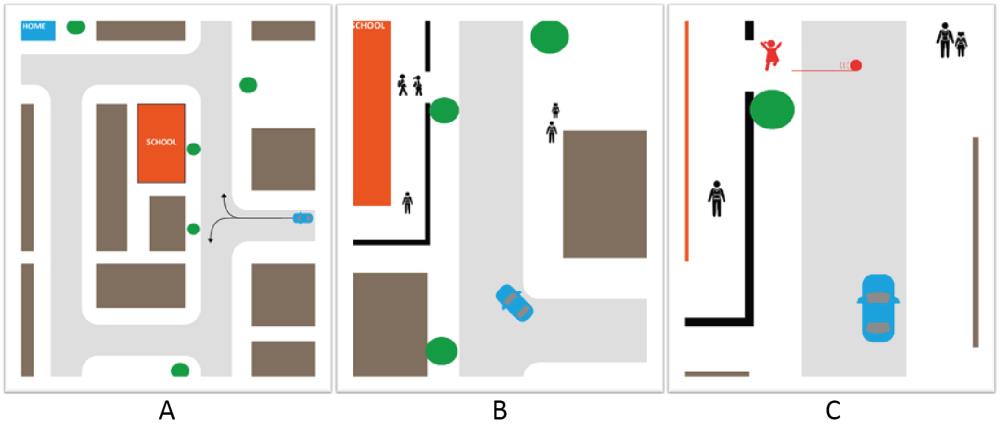
The study consisted of two parts: an online survey and a semi-structured interview. The survey gathered background information (e.g., age, profession, experience with AV development) on participants and sensitized them to the topic of social driving behaviour for a more fruitful interview. Three scenarios were prepared for the survey: a right-angle conflict with a bicycle, merging on a highway, and approaching a school (see Appendix A). Each illustrated scenario consisted of three consecutive steps in time, zooming in from the overall traffic context to specific interactions between an ego vehicle and other road users. Each step was accompanied by a set of three questions asking which driver behaviour is required to avoid a conflict, which cues facilitate such behaviour, and if one’s answer would differ if the ego vehicle would have been an AV. The scenarios fostered reflection on interactions between AVs and other road users before ultimately raising the question on how social driving behaviour should be defined from the perspective of an AV.
A semi-structured interview was prepared to ensure the same topics and terminology were used for all participants. The research question was transformed into interview questions using the guidelines described in (Kumar, 2011). Four main points were addressed (see also Appendix B): 1) social aspects of driving behaviour (e.g., definition of social driving behaviour, example scenarios), 2) the development process (e.g., requirements, algorithms, limitations, updates and improvements), 3) the relation between social driving behaviour and traffic safety, and 4) challenges on realizing potential benefits of social driving behaviour. An interview template was created by interleaving the interview questions with answer fields and pointers for the interviewer to ask for additional details based on the answers provided by the interviewees. The understandability of the survey and interview questions, as well as the general flow of the interview were piloted with a human factors researcher with a focus on AV technology.
3.3. Procedure
A link to the online survey was sent in the week of the interview. To shorten the duration, for each participant two out of three scenarios were randomly selected and included in the survey. All surveys were filled out by the time the interviews were conducted. The interviews were held online using Microsoft Teams in November 2023, with a duration of approximately one hour. Participants were again informed about the purpose of the study, asked if they prefer to be anonymous, and asked how they should be referred to in subsequent reporting. With their consent, the interviews were recorded to facilitate analysis by the authors of the present paper. Next, open-ended semi-structured interview questions were posed to allow the participants to share their views in their own terms. When needed, follow-up questions were asked to ensure participants’ answers were interpreted correctly. When participants seemed to have difficulty providing examples of social driving behaviour, previous answers relating to the selected survey scenarios were used in the interviews to facilitate discourse. Assisted by the interview template, all interviews were conducted by author RJJ, while the authors DC and RdZ made notes. Any additional questions based on these notes were asked by the end of the interview. During interviews, participants frequently provided elaborate answers not only in relation to the original interview question, but also relating to an interview question not yet asked. In such cases the latter question was skipped.
3.4. Data logging & analysis
A thematic analysis was performed in line with the phases described in Braun and Clarke (2006). The main purpose of this analysis was to provide a ‘rich description’ of the data set, in which themes are identified at the ‘semantic level’. A rich description means an accurate reflection of the content of the entire data set where all statements are related to a theme (implying that themes can be based on a subset of the participants), and interpretation at the semantic level means that themes are identified within the explicit or surface meanings of the data (cf. Braun and Clarke (2006)).
Directly after the interviews both note-takers scanned through their notes for relevant statements that were made during the interviews (phase 1: familiarization). In case of unclear notes, the interview recording was consulted. All statements were gathered in a spreadsheet and categorized according to the original interview questions. Initial codes referring to interesting features of each statement were assigned bottom-up (phase 2: generating initial codes). Next, two of the authors individually identified themes by looking at statements with common codes (phase 3: searching for themes).
A joint session focused on the resulting set of themes (phase 4: reviewing the themes). Themes identified by both authors were selected straightaway, whereas themes identified by one author were first discussed with the other author and selected only if the theme did not overlap with previously selected themes. A thematic map was created to identify how themes relate to each other, to ensure there is not too much overlap between themes, and to identify sub-themes. An initial description of each (sub-)theme was formulated (phase 5: defining and naming themes). Finally, statements capturing the essence of a theme were selected, and a description of the theme was prepared (phase 6: producing the report). For each theme, concrete examples were provided through text boxes to make the theme more tangible for social scientists (as recommended by Hadfield-Hill et al. (2020)). Typically, summaries of the actual verbatim were created, in part to reduce the length of the (at times elaborate verbatim), and in part to improve readability, given the fact that examples were frequently interrupted by other examples or trains of thought. A draft version of the results section was presented to the participants, with the question to indicate whether the interpretation of their statements (including aforementioned summaries of the verbatim) corresponded with the original intention of the statements. All participants provided feedback, and the results section was revised accordingly.
4. Results
Statements made by specific participants are hereafter referred to by their participant number (e.g., ‘P1’, see Table 1 for more information on the participants).
4.1. Defining and framing social driving behaviour
In the questionnaire, participants were asked to provide their own definition of social driving behaviour. These definitions generally contained the following terminology: anticipation, social norms, social context, interactions, politeness, communication, social interaction, interpretation of behaviour and common understanding of behaviour in traffic. Most definitions were highlighting the positive aspects of social driving behaviour. At the start of the interview participants were shown our value-free definition of social aspects of driving behaviour: “driving behaviour that directly or indirectly influences and/or takes into account other road users, i.e. their state, behaviour or goals”. Where social driving behaviour can be anywhere on a continuous scale from anti-social to pro-social, i.e., from disrupting to facilitating other’s state, behaviour, and/or goals. All participants understood and agreed to adopt this definition for the remainder of the interview.
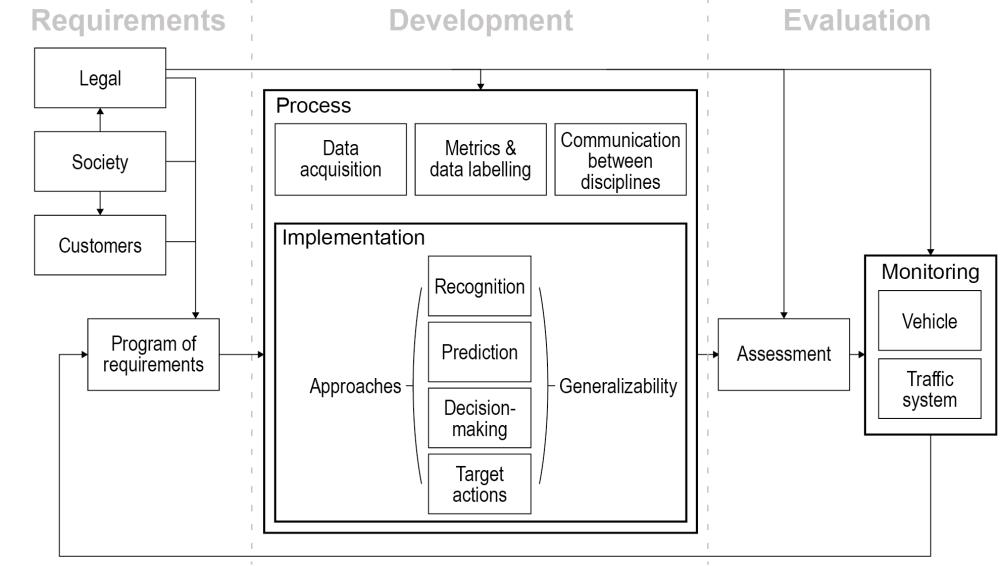
The remarks made by participants during the interview related to a wide range of themes throughout the development process, which eventually provided the basis for the thematic map shown in Figure 2. The process consists of three phases: requirements, development and evaluation. Within these phases several themes are represented by blocks. In the following paragraphs each theme is presented in more detail.
4.2. Process phase I: Requirements
Requirements for development follow from stakeholder input across several domains (legal, society, customers), as well as from industry itself.
4.2.1. Legal
Legislation was named multiple times as a way to create incentive for the automotive industry to implement or take into account social aspects of driving behaviour (P2, P4, P7). In this regard, also the requirement in the ALKS legislation (UNECE 2021) about minimizing risks to at least the level of a careful and competent human driver was mentioned. The main challenge here is how do you prove that you adhere to this requirement, i.e., how is it technically defined and measured (P5, P6, P7)?
Another requirement that was mentioned was the transparency of the algorithms (P2, P3). This can influence the choice of model approach, i.e., black or white box. Also, legislation regarding exceptional road users, such as funeral processions and blind people, was mentioned as difficult to deal with for AVs (P2).
Legislation was also mentioned as a means to support AVs, such as counteracting bullying of AVs (P2).
4.2.2. Society
The role of society is also diverse. On the one hand, society plays a role in defining requirements, such as deciding what safety target should be met before AVs are allowed on the road (P1, P3), or what is considered a careful and competent driver (P4, P7). Also, these requirements and in general driving behaviour can differ between countries, which can result in differences in requirements for AVs in different countries (P1, P5, P6, P7).
On the other hand, society was also mentioned as a means to label data. Open datasets such as those of Waymo can, for example, be accessed by the public who can aid in labelling it and identifying troublesome events.
Furthermore, society does not always discriminate between AV technologies of different companies when judging these technologies (P6). Consequently, a crash with one AV model of one particular manufacturer may potentially cause a decline in trust in all other AV manufacturers. This makes the whole industry interdependent. Also, as the challenges for this industry are viewed as immense, participant P6 mentioned the need to work together, rather than as competitors. As mentioned before, more open access datasets should be made available (e.g., Department of Motor Vehicles (DMV), n.d.; National Highway Traffic Safety Administration (NHTSA), n.d.; Waymo, n.d.-a; Zenseact, n.d.), but also more data and knowledge sharing between industries and research institutes should occur.
4.2.3. Customers
Customers in particular play a significant role in AV development. Often the customer benefits are reflected by choices in the algorithms cost function, such as passenger comfort or travel time (P2, P4). These benefits often weigh stronger than the benefits for other road users, who are unintended users of the technology (P4).
Customers can also aid with data acquisition. Their vehicles can log data during their trips which can be used by the manufacturer to improve their algorithms and detect edge cases (P1). Additionally, participant P1 mentioned work on specialized interfaces that allow customers to provide input on incidents during their trip.
Finally, several participants mentioned that there is a difference between companies (P2, P5, P7). Participant P2 mentioned their different purpose and different customer type. The robotaxi’s provide mobility as a service, while more conventional car manufacturers focus more on a personal vehicle. These customers can have different requirements, leading to different design choices. Another difference between these two manufacturer groups is that the robotaxi’s, such as Cruise and Waymo, originate from software related companies, while manufacturers of personal vehicles, such as BMW/Mercedes/Volvo, have a long-standing history in car manufacturing (P7). Their different backgrounds can also be of influence on the development of their AVs and the priorities they have. Finally, also differences in safety requirements were mentioned (P5), e.g., differences in safety requirements in general, but also during the monitoring stage where definitions of what is deemed an “incident” might differ between companies.
4.2.4. Program of requirements
The input from the previously mentioned stakeholders, as well as the industry itself, comes down to several requirements regarding social aspects of driving behaviour. First and foremost, AVs should imitate humans, or at least careful and competent humans (P2, P4, P5, P7). By imitating human driving behaviour, the AV should be as readable and predictable for other road users as any human driven vehicle is (P4). If they are not, the safe driving strategies humans adopt in traffic, such as anticipating events, will be jeopardized (P7).
However, humans should not always be imitated (P7). On one hand, unsafe behaviour of humans should not be imitated. On the other hand, some safe human behaviour might be compensating for their limitations. If the AV does not have such limitations, the compensating safe behaviour might also not be necessary.
The big open question thus still remains what should be imitated and what not. There is a need for a framework or rule book of social rules and norms that can be used to define them, implement them in AVs and be used for the assessment of these vehicles (P4, P6, P7).
Currently, requirements related to safety targets are clearly defined in advance (P1, P2, P3, P4, P5, P6, P7). Such requirements are defined as, for example, the number of collisions per driving hour (P5) or the maximal number of collisions of type X per km (P1). Requirements regarding social aspects of driving behaviour are not clearly defined at the start of the development process (P2, P4, P5, P7), but are an emergent property when trying to reach the safety target (P1, P2, P5) or quickly decided upon during development and are often very reliant on context, e.g., in situation X behaviour Y is expected (P2). They are generally not a goal, but did gain more interest in recent years (P4, P6). Participant P5 mentioned that some automotive companies assume that the safety targets set cannot be reached without implementing social driving behaviour. Other participants mentioned that there are some predefined requirements on interaction, such as interaction behaviour during merging (P1, P2). As requirements regarding social driving behaviour seem to mainly emerge during development, developers potentially play an important role in defining them.
4.3. Process phase II: Development
The requirements, synthesized from different stakeholder inputs, are generally the start of the development process. Participants mentioned that the global development cycle of the algorithms for automated driving includes setting up a model structure, gathering data, label it, fit model parameters to the data then test the models (P1, P3, P5, P6, P7). Accordingly, themes within the development process involve ‘data acquisition’, ‘metrics & data labelling’, and ‘communication between disciplines’. Additionally, the development process involves a cluster of themes relating to (software) implementation, including differences in ‘approaches’ and challenges relating to ‘generalization’. Following the system description of Figure 1, the perception subsystem is associated with the themes ‘recognition’ and ‘prediction’, and the planning subsystem is associated with the themes ‘decision-making’ and ‘target actions’ (i.e., as output from decision-making). The control subsystem in Figure 1 was not discussed in the interviews.
4.3.1. Data acquisition
The real-world data is gathered with probing vehicles, which do not necessarily have the automated driving functions active, and can just be customer vehicles (P1, P5). Alternatively, tests on the public road with specialized test vehicles and test drivers can be used in certain circumstances (P1, P5, P6). For some processes, such as updating models, specific parts of customer data from for example incidents or crashes can be used (P1, P4, P5). In other cases, all data from driving in a specific region is used to fit model parameters of general driving behaviour in that region (P5).
4.3.2. Metrics and data labelling
Before data can be used to fit model parameters, it has to be labelled (P1, P3, P4). This can be done manually by experts, automatically or a combination of the two. A shift towards automatic annotations was visible according to two participants (P1, P3). For interactions, crashes and incidents that are automatically detected, often a human interface is used to detect false positives (P1). Participant P1 also mentioned that his company aimed to have HMI’s so customers can give feedback on scenarios. Another participant mentioned that a robotaxi company also reaches out to the public in that they have an open dataset so everyone can see and help labelling incidents and accidents (P4).
For crashes and incidents, measures such as time-to-collision or even hard braking can be used to label part of the data as a safety critical situation (P5). GPS location is used to determine if data was obtained in a specific area (P5). Measures such as average speed, average time headway or how quickly lane changes are performed are used to describe general driving behaviour in geographic locations (P5). Participant P1 mentioned that in other cases “behaviour” is difficult to define in terms of measurable signals.
4.3.3. Communication between disciplines
Two participants mentioned the effect of differences in disciplinary background on the development of AVs (P4, P6). This is specifically true for engineers who are designing the systems and psychologists who investigate how the systems’ behaviour is perceived. For example, psychologists are knowledgeable on the various messages conveyed by different braking patterns in diverse situations. However, translating this knowledge into more quantitative engineering specifications for a braking algorithm proves to be challenging.
The importance of communication between disciplines is further highlighted by the fact that these participants (P4, P6) explicitly mentioned the effect of the interview itself on their view of social driving behaviour in traffic. Participant P4 mentioned the interview created more awareness of the complexity and importance of social driving behaviour in traffic, while participant P6 mentioned the interview highlighted the benefit of a handbook of social driving behaviour for engineers, which could be used to quantify and evaluate such behaviour.
4.3.4. Approaches
The participants mentioned that there are several approaches to defining the algorithms in the AV subsystems: rule-based, machine learning and hybrid approaches (P3, P5, P6, P7). In the rule-based approach, the algorithm is based on a set of rules designed by experts (P3, P7). Data is used to fit the corresponding model parameters (P3, P7). A main benefit of the rule-based approach is the transparency of the algorithms, as they are based on explicit rules (P2, P3, P6). Additionally, there are less parameters so less data is needed to fit these models (P3). In the machine learning approach, the algorithm is based on patterns found in the data during a learning phase (P1, P2, P3, P6). These models have many parameters and thus need large amounts of data to be fitted (P3). Additionally, especially for complex systems, this approach results in black box models that are hard to interpret (P2, P3).
For complex tasks such as automated driving, it can be nearly impossible to define all necessary rules for safe driving (P6), which is why more and more use is made of machine learning approached (P3, P6). These models severely lean on the quality and quantity of the data that is used, and with an ever-changing dynamic environment that is traffic, gathering and processing sufficient data is a huge challenge on its own (P1). In a hybrid approach both rule-based and machine learning approaches are combined, ideally leveraging the best of both approaches (P6).
4.3.5. Generalizability
One of the major challenges in vehicle automation is the lack of data and the corresponding challenges with generalizability of the models (P1, P4, P7). Models can produce desired behaviour in one situation, but perform poorly in another. As traffic is a highly dynamic system, these changes can occur at any time anywhere. The importance of context in this regard was highlighted by several participants (P1, P3, P7). In other words, small changes to a scenario can result in a large difference in desired behaviour.
4.3.6. Recognition
Participants were divided on vastness of the perception capabilities of AVs. Participant P7 mentioned that there is virtually no limitation with respect to technology and object recognition. However, other participants gave multiple examples of current challenges that object recognition and intention recognition algorithms face.
A first step in the recognition process is detecting an object. A second step is recognizing this object and assigning characteristics to it. A third step can be to derive the intention of a road user based on, for example, their movement patterns and attitude. In the social science domain this roughly corresponds with the perception and comprehension levels of situation awareness (Endsley, 1995). Two participants mentioned that especially the latter, intention recognition, is a very challenging task for AVs (P1, P4). In general, the AVs are not capable yet of fully understanding the world around them (P7), i.e., assigning characteristics, importance and meaning to all that is detected.
4.3.7. Prediction
All participants agreed that anticipating future scenarios makes driving safer as there will be less need for emergency manoeuvres, but that this at the same time is a big challenge for AVs (P1, P2, P3, P4, P5, P6, P7). As the future is never a 100% sure, algorithms, like humans, make multiple predictions, aiming to cover the relevant part of the prediction space (P3). Thus, hoping that the actual outcome is among those predictions. Selecting such a relevant subspace out of the potentially infinite number of possible predictions is a challenge on its own (P3).
Another challenge lies in the way these predictions are made (P3). In its simplest form, one can look at each road user independently and predict their future behaviour. However, this is a strong simplification of reality, where road users are influenced by behaviour of others. A more realistic approach is therefore to make a joint prediction, where a prediction is made of all road users collectively, including their interactions. This is a much more complex problem to solve algorithmically and simple upscaling of current methods would require significantly more computational power (P3, P6). What makes the problem even more complex is to make such joint prediction of reactions to your reaction to their behaviour, similar to what humans do (P1, P3, P6). And this prediction of reactions and all the options one has as how to react results in a large problem that at some point can no longer be solved in real time (P3). Therefore, choices must be made as to which subset of predictions are considered (P3).
Participants (P2, P4, P6) mentioned that vehicle-to-vehicle communication could aid predictions, as intentions of surrounding traffic can then be directly communicated, rather than observed from actions. However, as participant P4 mentioned, 1) this is only effective if a large part of the vehicles are using this technology which will not be for another 10 to 15 years, 2) it will not apply to human controlled ways of transport, and 3) the prediction horizon of such messages is only in the order of 5 seconds.
4.3.8. Decision making (cost function)
Mainly in the planning part of the vehicle automation algorithm decisions are made on what behaviours to exhibit (P3). This can for example be decisions on which route to take (mission planning), which manoeuvres to execute (motion/path planner) or which speed or following distance to stick to (behavioural planner). These decisions are based on trade-offs of what is important (costs and benefits) and to which constraints to adhere to (P2, P3, P4, P6). Some participants mentioned that safety is mainly seen as a constraint (P2, P3), i.e., keep a minimum distance to other objects. Aspects to optimize for are trip duration and passenger comfort. Other participants mentioned that safety is, next to being a constraint, also an aspect to optimize on (P1, P5, P6), i.e., a slightly safer action can be chosen, even if it negatively influences trip duration.
Participants did not think social driving behaviour on its own was optimized for. Instead, social driving behaviour either emerged when optimizing for safety (P1, P2, P5) or was seen as a side project (P4). Participant P4 mentioned that, while not currently the case, comfort and safety of other road users should be considered in the decision-making process. For example, if certain behaviour would frustrate other drivers, this should be represented by a specific cost in the cost function. Several participants agreed that including some sort of cost for social aspects of driving behaviour in the cost function is desirable (P4, P6, P7), but that it is difficult to define this in a way that it can be implemented.
4.3.9. Target actions
Participant P7 mentioned that AVs are expected to excel in collision avoidance (i.e., reactive behaviour), such as stopping for a child that suddenly runs onto the road, but that avoiding such emergency situations in the first place (i.e., proactive behaviour), is more difficult for AVs. Accordingly, target actions can be classified as reactive or proactive. Proactive measures are focused on making the task of the AV simpler. However, this is often done without any regard for any secondary effects this might have on surrounding road users. Participant P4 noted that cautious driving behaviour might be only applicable to the early generation AVs. This behaviour might not be representative for next generation AVs. Proactive target actions can be further stratified in terms of Michon’s (1985) hierarchical model of driving: operational (associated with automatic action patterns), tactical (associated with controlled action patterns), and strategical control (associated with general plans). Most of the participants (P1, P2, P3, P4, P5, P6) mentioned the ability of AVs to proactively adjust their driving style to circumstances at the operational level. At the tactical level, some participants (P2, P5, P7) provided examples of proactive manoeuvres that AVs execute or proactively not execute to increase safety. Some participants (P2, P3, P5) mentioned strategical decisions to increase safety.
4.4. Process phase III: Evaluation
Both during and after developments of the AV an evaluation on their safety performance is done. We made a distinction between participant input regarding assessment during the development or type approval of the AV, and monitoring of their safety after they are allowed on the road. Monitoring can take place at the level of an individual vehicle, and at the level of the traffic system.
Participant P5 mentioned the multi-pillar approach for assessment of automated driving systems (UNECE, 2022). In this approach the three original pillars for safety assessment, track testing, real world testing and audits/assessment, are extended with two additional pillars: simulation/virtual testing and in-service monitoring and reporting. These five pillars all use a scenario catalogue which contains descriptions of real-world driving situations that may occur during a given trip.
4.4.1. Assessment
Similar to the challenges mentioned during the requirement phase, also for assessment of social driving behaviour the challenge is on how to define the behaviour of a competent and careful driver (P4, P6, P7). On top of that, assessment of adhering to such definition requires a measurement method and threshold definition to determine if the vehicle’s safety performance is adequate (P5).
4.4.2. Monitoring of vehicles
Many things are tested in simulation, but as participant P3 mentioned, not everything can be tested in simulation. Edge cases (e.g., circumstances that the system may not have been specifically trained or programmed to handle) are often only noticed when driving on the public road (P4). Descriptions of edge cases can be insightful into understanding what current technological challenges and capabilities are.
Participant P5 mentioned the monitoring process as it is tested with two automotive companies currently. Data should be logged during accidents using the Data Storage System for Automated Driving, after which an automated process is started to improve the system and avoid such acci-dents the future. Also, incidents should be monitored, but only detectable incidents are consid-ered. The examples below highlight the stark differences in interpretations among companies on what constitutes a detectable incident requiring monitoring. P5 noted that the Company 1 would not receive EU type approval for their AV system with their definition of detectable incidents.
4.4.3. Monitoring of the traffic system
Several participants highlighted the difference between a safe vehicle and a safe traffic system (P5, P6, P7). They highlighted the need for looking at traffic safety, i.e., all collisions happening on the road, rather than vehicle safety of specific vehicles alone, when inserting AVs in the traffic system. Two participants commented: “Traffic safety is a consequence of all interactions” (P7), and “All actions, even if you do them for traffic safety, might increase risk (in another way), the question is, how much will it increase risk as a total” (P6). Several participants mentioned the expected impact of AVs on traffic safety. Some expect improvements, some see that updates make AVs better, some are not convinced of improvement and some expect initial improvement and then a deterioration. As participant P7 put it: “There is an equilibrium at the moment that yields the number of traffic accidents we have now […] If we disrupt the system with this new vehicle, we do not know where we end up.”
5. Discussion
The present study seeks to accommodate interdisciplinary collaboration between social scientists and engineers, by providing insights into current AV technological capabilities regarding social driving behaviour and road safety, and the related challenges from an engineering perspective. To that effect, seven interviews were held with engineers working in the AV domain. The research question “how can social scientists use their knowledge to improve social driving behaviour of AVs?” was leading for the interviews. Direct answers to this question are shown in italic font and further elaborated on in the text below.
5.1. Main takeaways
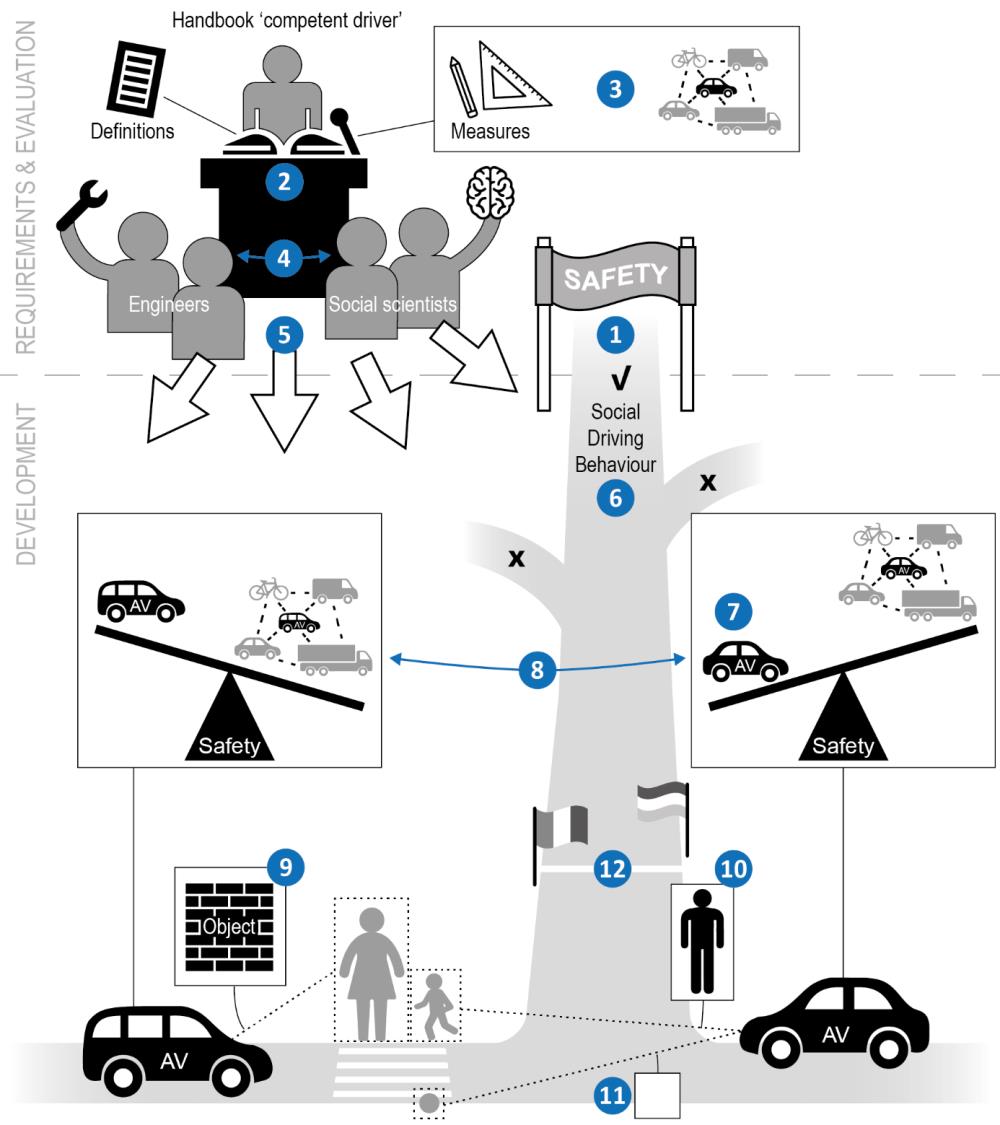
The interviews highlighted that the materialization of social driving behaviour in AVs is influenced at all stages of the development process, i.e., during the requirements phase, the development phase and the evaluation phase. As demonstrated in previous research (Brown et al., 2022, 2023; Vinkhuyzen & Cefkin, 2016) social scientists can use their knowledge in each of these stages to improve social behaviour of AVs on the road. Main takeaways and challenges are discussed next, and visualized in Figure 3 (numbered circles are referred to in the text as #<number>).
5.1.1. Communication between disciplines
Initial ideas on the term social driving behaviour elicited positive associations of driving behaviour in the participants, such as yielding the right of way and taking into account other road users. At the start of the interview instead a value-free definition of social aspects of driving behaviour was introduced: “Driving behaviour that directly or indirectly influences and/or takes into account other road users, i.e. their state, behaviour or goals.” This definition allows for both pro-social and anti-social interpretations of behaviour and is similar to the use of the term ‘social behaviour’ in the social sciences (Schmitt, 1998). Social scientists should be aware that these definitions can differ when interacting with those outside of this field, such as engineering (#4).
Pursuing similar definitions across disciplines for social driving behaviour is important, as it affects the perceived relevance of the subject for AVs. For example, at the end of the interview two participants explicitly mentioned how the interview highlighted the importance and the complexity of social driving behaviour for safe participation in traffic. It seems that the broad definition of social driving behaviour is underlying to this understanding. When discussing the need to implement social driving behaviour in AVs, focusing solely on pro-social behaviour such as yielding the right of way may make it appear as a trivial or low-priority feature to implement. However, considering social driving behaviour in its full scope reveals that, without intentional design, AVs will not simply lack social driving behaviour but may (inadvertently) exhibit anti-social behaviour on the road (Brown et al., 2023; Landolfi & Dragan, 2018). Given this full scope of the definition, a consensus was revealed among the participating engineers on the beneficial effect of implementing social driving behaviour in AVs on traffic safety (#1). One participant even deemed social driving behaviour a prerequisite for reaching the required safety targets.
Next to a shared understanding of basic social science knowledge, collaboration between disciplines is also fostered by sharing basic engineering knowledge, such as the capabilities and limitations of AV technology. For example, AVs can perceive their surroundings more accurately and on a wider range than human road users, but the interviews revealed that basic interpretation of situations and their elements (e.g., children, blind people) is still a challenge (11#). For example, including contextual elements, such as the relevance of a ball rolling onto the street when predicting behaviour of a child, might seem natural for the human road user, but is still a challenge for AVs (#11). Consequentially, the interviews revealed that prediction of the behaviour of these elements, their joint prediction and predicting multiple cycles ahead (i.e., potential action and reactions) is a major challenge (#10). This is in sharp contrast to how vehicle performance is often portrayed by the automotive industry [e.g., Waymo (n.d.-b)]. To avoid the pitfall of proposing utopian standards that are unlikely to be realized in practice, one should define requirements that are not only theoretically sound, but also practically achievable. Therefore, in line with the study by Vinkhuyzen and Cefkin (2016), interdisciplinary collaboration on implementing social driving behaviour may benefit from social scientists’ awareness of engineering challenges.
5.1.2. Requirements regarding social driving behaviour
The interviews revealed that many higher-level requirements are formulated prior to the development process, but as the development progresses additional lower-level requirements (i.e., for specific technical implementation) may emerge when trying to meet, for example, the safety targets. Two approaches to incorporate requirements on social driving behaviour were identified. First, participants believe that a top-down incentive (i.e., legislation) is the easiest way in which requirements related to social driving behaviour would be adopted at the start of the development process (#5). Here lies a vital role for social scientists in using their knowledge on social driving behaviour to inform legislators and aid in developing appropriate regulatory requirements, as also reflected in previous literature (Brown et al., 2022; Straub & Schaefer, 2019).
The second approach identified aims to influence the lower-level requirements. AV engineers could be educated on preferred behaviour and potential consequences of AV behaviour on social interactions in traffic, with the aim that such knowledge is used when defining low level requirements. Here lies a vital role for social scientists as the educators.
Both approaches though, were said to not include social driving behaviour as a goal, but rather as an emergent property when aiming to reach certain safety goals set by the company or regulatory bodies (#6). The interviews made clear that a major challenge for both approaches is finding a way to translate the qualitative requirements defined from a social sciences perspective to quantitative requirements that can be used by engineers. The ‘handbook’ on social driving behaviour that results from these translations requires a common understanding between the social science and engineering disciplines and is currently lacking (#2). Social scientists play a vital role in developing such a handbook in collaboration with engineers, as also suggested in previous research (Brown et al., 2022; Quante et al., 2024; Vinkhuyzen & Cefkin, 2016).
Automotive companies’ requirements for AVs differ per manufacturer (#8) and are shaped through input from various stakeholders, including legal authorities, customers, and society. The interviews revealed that legislation typically outlines mandatory requirements, whereas customer preferences inform additional, company-specific requirements. For instance, robotaxi companies may prioritize cautious driving behaviour (Rahmani et al., 2024), while manufacturers of personal vehicles might require options for the customer to select more aggressive driving styles (Tesla, 2024). The interviews further highlighted that companies can also differ in the safety targets they set for themselves on top of the legal requirements, which is reflected in the broad spectrum of star ratings for different vehicle models by Euro NCAP (Euro NCAP, 2024). The interviews also revealed that when it comes to design choices there are large differences between companies. For example, Tesla is designing their SAE level 2 system “Full Self Driving (supervised)”, which can be used everywhere, but lacks the reliability to drive without human supervision. Mercedes, on the other hand, focusses on high reliability of their SAE level 3 Drive Pilot feature that does not require human supervision, but has a very limited operational design domain. The interviews furthermore revealed that societal requirements, such as creating a safe and comfortable driving environment for all road users, are usually only adopted when they align with legal and customer demands. For effective collaboration, social scientists should recognize these differences when discussing social driving behaviour with specific automotive companies.
5.1.3. Evaluation of traffic safety
Traffic is a social system in which behaviour is governed by, amongst others, the norms and values of a large group of road users (Tennant et al., 2021). Changing the behaviour of a significant portion of this group by introducing AVs can influence these norms, values and corresponding behaviours of all road users and with that, the safety within the complete traffic system (Cohen et al., 2020; Straub & Schaefer, 2019). From the interviews, however, a focus on ‘single vehicle safety’ emerged (#7), as opposed to safety of the traffic system (referred to as the ‘second vehicle problem’ by Straub and Schaefer (2019)). Single vehicle safety generally considers only direct interactions between the ego vehicle and other road users, whereas in the second vehicle problem another road user’s unexpected actions while interacting with an AV has a cascading negative effect on the second or third road user behind them. Another example of indirect effects of AV behaviour on traffic safety was found by Knoop et al. (2019), where the behaviour of a platoon of AVs causes frustration in other road users who then initiate dangerous manoeuvres. Knowledge on social driving behaviour can aid in highlighting the difference between vehicle and traffic safety and developing requirements to improve safety at both levels.
Although the interviews revealed consensus on the relevance of social driving behaviour for traffic safety, the magnitude of its impact and the most influential behaviours remained unclear. One way to highlight which social behaviours are relevant could be to put more focus on traffic safety, rather than individual vehicle safety, in the evaluation process of AVs (#3). Social scientists can play an important role in this evaluation process by providing input for performance metrics to assess the quality of social interactions (e.g., Quante et al. (2024)). The evaluation process is currently based on scenario-based testing, making the selection of scenarios crucial for adequate evaluation (Riedmaier et al., 2020; Sánchez et al., 2022). The interviews revealed that it is currently unclear which scenarios should be tested and what exactly is meant in these scenarios with the UNECE requirement to minimize risks to at least the level of a competent and careful human driver (UNECE 2021). Selecting relevant scenarios based on crash databases, which is often done for ADAS evaluation (Aleksa et al., 2024), might not suffice for evaluating AVs, as these databases mainly contain crashes between human driven vehicles. Situations which are at high risk for AVs might be significantly different (Liu et al., 2021). Social scientists could aid the development of new scenarios through identification of troublesome interactions between AVs and other road users in data of both pre-deployment on-road tests and post-deployment monitoring, in line with previous research (Brown et al., 2023; Brown & Laurier, 2017; Cleij et al., 2024; de Gelder et al., 2024).
5.1.4. Development of social driving behaviour
Social scientists can also use their knowledge in the development phase to impact social driving behaviour of AVs, for example by providing domain expert knowledge to the white box part of hybrid automated driving algorithms (Paardekooper et al., 2021). A hybrid algorithm may use machine learning on a perception level for lane marking recognition (black box), while implementing hardcoded rules on a cognitive level, such as expecting participants to stand still on a sidewalk and not in the middle of the road (white box). The previously mentioned handbook with quantitative descriptions of social driving behaviour (#2) that social scientists could develop, would be beneficial for the development of the white box features of such systems. In Vinkhuyzen and Cefkin (2016), for example, the social driving behaviour of following a car at an intersection called “piggybacking”, was put forth as good candidate to program into the perception and possible action of the AVs of Nissan.
Social scientists can also aid in understanding and improving the effect that AV behaviour has on other road users. The interviews suggest that the reason for implementing proactive safety measures is often due to the notion that AVs are still far from performing well in all traffic situations (e.g., avoiding school zones or increasing safety margins in the presence of cyclists). These measures focus on making the task of the automation easier, but do not always take secondary effects on other road users into account (#7). For example, driving with a large time headway or reducing speed to increase safety margins on a crowded highway can agitate the drivers of following vehicles who in turn might perform dangerous overtaking manoeuvres (Knoop et al., 2019). Also, stopping in the middle of the road when a situation is too complex for the AV to handle can block traffic, confuse other road users, and consequently decrease efficiency and traffic safety (Brown et al., 2023). Social scientists’ knowledge on real world interactions between road users can be further developed and used to predict implications of such proactive safety measures so that they can be optimized towards minimal negative impact on other road users in terms of safety, comfort and efficiency.
Similarly, social scientists’ knowledge on real world interactions between road users could improve social driving behaviour of AVs, in terms of direct and indirect communications. The interviews revealed that AVs are often programmed to see other road users merely as obstacles without accounting for their needs and possible reactions (#9). However, as stated by Brown et al. (2022) "If we are to understand, design, regulate and critique autonomous systems it is important that we also understand how they act interactionally in practice, in our pre-existing social world.". Somewhat surprisingly, eHMIs (i.e., external communication devices on AVs that communicate the intentions of the AV to other road users) did not emerge as a theme from the interviews. Several studies have examined effects of eHMIs on pedestrian crossing behaviour (e.g., Eisele & Petzoldt, 2022; Faas et al., 2020; Kooijman et al., 2019) Possibly, the engineers interviewed in the present study have been working on algorithm development, whereas eHMIs may be developed in other (design oriented) departments. Alternatively, eHMIs were not addressed if the engineers deemed them unnecessary, in line with arguments raised in de Winter and Dodou (2022).
And finally, social scientists could potentially aid the challenge of generalization of behaviour over different traffic scenarios (#12). Traffic is highly dynamic, and different traffic situations require dealing with different sets of parameters (e.g., different road users, different environments). Small variations in these parameters, such as the position of puddles on the road or the age group of a pedestrian, can significantly impact the (predicted) behaviour of other road users and consequently the desired behaviour of the AV. For example, a pedestrian generally will take the most direct path to cross the street, but will adjust their trajectory if a large puddle is present on this path. This inherent variability makes it challenging to generalize automated driving algorithms. Several study approaches that can help tackle this challenge are already found in literature, especially related to pedestrian crossings. Zhao et al. (2024), for example, identified the presence and behaviour of other pedestrians through a virtual reality experiment as a factor that influences the understanding of and reaction to an AV’s eHMI. Sarker et al. (2024) identified significant factors influencing the drivers’ yielding behaviour from results of a survey among drivers and focus group interviews in combination with behavioural change theory. And Li et al. (2025) collected and published naturalistic driver–pedestrian-yielding data from 18 unsignalized intersections across Minnesota. The data was used to investigate the impact of the built environment on driver-yielding behaviour based on 50 distinct contextual variables. In line with these studies, social scientists can address the challenge of generalization in AV algorithms by conducting further research into identifying and categorizing factors that influence human road user behaviour in different traffic situations.
5.2. Limitations and recommendations
A notable limitation of this study is the small sample size, limiting the possibilities to perform quantitative analysis on verbal data. The goal of the study, however, was not to provide an exhaustive list of examples and challenges relating to social driving behaviour, but rather to explore the phenomenon from a broad engineering perspective. For this reason, engineers working in different domains of AV development (i.e., industry, academia, research institutes, vehicle authorities) were selected for the interviews. In future research more engineers could be interviewed to gain an even broader perspective. For example, none of the engineers mentioned that vehicle to infrastructure communication could aid the AV with reading the road. Another recommendation is to identify priorities for tackling the challenges put forth in this paper. This was not a goal of this study, and due to the limited number of participants and the subjectivity that comes with semi-structured interviews, such priorities can also not be deduced from the presented results. Instead, the presented results can, for example, form the basis for a large-scale questionnaire that specifically probes priorities in this set of challenges. The qualitative insights gathered provide a preliminary exploration into the development of AVs, particularly regarding social driving behaviour. The findings offer an initial view into this emerging field, helping to bridge the gap between the technical complexities of AV algorithms and their manifestation in real-world driving scenarios. By translating intricate concepts, such as cost functions and recognition and prediction algorithms, into observable road behaviours, this study enhances the accessibility of these technical aspects for social scientists, facilitating interdisciplinary understanding and collaboration. It is recommended that in future research such translations from the technical to the social domain are also adopted, to further facilitate interdisciplinary research and development.
The interviews highlighted that social scientists can contribute to the development of social driving behaviour in AVs by creating a handbook that provides formal and quantifiable descriptions of these behaviours. Whether human behaviour in traffic is indeed quantifiable at the level of detail desired by engineers is a challenge on its own. As a start, we imagine that a handbook could be based on probabilities of other road user behaviour as function of context, road user characteristics, and corresponding ranges of acceptable AV behaviour. Developing this handbook will likely require substantial collaboration across various disciplines. Future research should therefore investigate how to best organise such collaboration and further define what such a handbook should look like.
A final recommendation applies to the regulatory domain. As AVs can considerably change the dynamics of the complete traffic system, their evaluation should also be expanded from single vehicle safety to their effect on safety (and comfort) in the larger traffic system. Such evaluations will furthermore provide a top-down incentive to design automatic vehicles that benefit the whole of society.
6. Conclusion
As AVs will likely take part in traffic more and more often in the near future, their ability to safely interact in this social environment will become more important. To ascertain safe interactions between AVs and other road users in traffic it is essential that parties responsible for developing and testing these vehicles have a proper understanding of manifestations of social driving behaviour and their consequences for traffic safety. Such understanding is crucial as it may in turn guide the implementation of algorithms and cost functions underlying vehicle automation technology. This interview study takes a first step toward this goal by highlighting engineering challenges and identifying how social scientists can contribute.
The main finding is a lack of well-defined high-level requirements for social driving behaviour and the consequent reliance on engineers to establish these requirements through trial and error during on-road testing. Social scientists can support the establishment of these requirements earlier in the development process by compiling a handbook of social driving behaviour, which includes formal and quantifiable descriptions of these behaviours.
A technological challenge that engineers still face is recognizing other road users in traffic and predicting their behaviour, a fundamental aspect of social driving behaviour. To encourage more research and development efforts in this domain and, consequently, support the safe introduction of AVs on our roads, requirements regarding social driving behaviour should be incorporated in the evaluation processes of AVs.
Acknowledgement
The authors would like to thank their colleague Celina Mons, MSc., for her valuable input on the draft of this manuscript.
CRediT contribution statement
Diane Cleij: Conceptualization, Data curation, Investigation, Methodology, Project administration, Supervision, Validation, Writing—original draft, Writing—review & editing. Rins de Zwart: Conceptualization, Data curation, Investigation, Methodology, Validation, Writing—original draft, Writing—review & editing. Reinier J. Jansen: Conceptualization, Investigation, Methodology, Visualization, Writing—original draft, Writing—review & editing.
Declaration of competing interests
The authors declare that they have no conflict of interest.
Ethics statement
The methods for data collection in the present study have been approved by the ethical committee of SWOV.
Funding
This study was funded by the Dutch Ministry of Infrastructure and Water Management. The funder played no role in the study design, collection, analysis, interpretation of data, writing of the report, or in the decision to submit the paper for publication. The funder accepts no responsibility for the contents.
Declaration of generative AI use in writing
During the preparation of this work the authors used ChatGPT to improve readability. After using this tool, the authors reviewed and edited the content as needed and take full responsibility for the content of the publication.
Editorial information
Handling editor: Haneen Farah, Delft University of Technology, the Netherlands.
Reviewers: Laurent Carnis, Université Gustave Eiffel, France; Andrea Paliotto, University of Florence, Italy.
Submitted: 2 December 2024; Accepted: 3 March 2025; Published: 25 March 2025.
Appendix
Pre-interview survey
A.1. Background questions
-
What is your current age?
-
What is your current profession?
-
What is your professional experience in the development of autonomous vehicles?
A.2. Scenarios
Three scenarios were prepared for the survey: a right-angle conflict with a bicycle (see Figure A.1), merging on a highway (Figure A.2), and approaching a school (Figure A.3). For each scenario, the corresponding panels appeared one-at-a-time, accompanied by a short description of the panel (see captions in Figures A.1, A.2, A.3), and the following three questions:
-
What behaviour of (the driver of) the blue vehicle ensures that a conflict is avoided?
-
Which cues and/or information facilitate(s) the above behaviour?
-
Would your answers differ if the blue vehicle is an automated vehicle? And if so, how?
A.3. Questions on definition and application of social driving behaviour
-
How would you define ‘social driving behaviour’ from the perspective of an autonomous vehicle?
-
What is your professional experience with ‘social driving behaviour’ from the perspective of an autonomous vehicle? Please tick all boxes that apply.
-
Research
-
Development
-
Policy
-
None
-
Other
- Do you foresee market-ready implementations of ‘social driving behaviour’ in autonomous vehicles within 5 years from now?
-
Implementations are already on the road.
-
Within 5 years is feasible
-
More than 5 years are required.
-
Social driving behaviour by autonomous vehicles is not feasible.
Interview structure
B.1. Questions on social aspects of driving behaviour
-
Is this definition of social driving behaviour clear, do you have any questions? “Driving behaviour that directly or indirectly influences and/or takes into account other road users, i.e. their state, behaviour or goals.”
-
Can you give some examples of implementations of social driving behaviour? And do you expect these to be on the market within 5 years?
B.2. Questions on the development process
-
Are there requirements to ensure that certain social driving behaviour is implemented? For example, is social driving behaviour part of the design brief? Can you relate this to the examples?
-
Can you elaborate on how algorithms for social driving behaviour are established? E.g., what kind of decisions are implemented within an algorithm, and which inputs are used to inform those decisions?
-
All technology has a certain operational design domain. Which limits would you expect regarding social driving behaviour? In which real-world driving scenarios would you expect these limits to emerge? How would these limitations and/or scenarios relate to the examples?
-
Humans make mistakes, and -hopefully- learn from them. Likewise, AVs may make mistakes. How do you expect AVs will learn from their mistakes, and what would be the role of humans in this learning process?
B.3. Questions on the relation with traffic safety
-
How would you expect that social driving behaviour by AVs will influence traffic safety? Can you relate this to any of the examples you mentioned before?
-
Social driving behaviour by AVs may influence the behaviour of other road users. How would you expect this to affect traffic safety? Again, can you relate this to any of the examples previously mentioned?
B.4. Questions on challenges
-
Which challenges do you see towards realizing the potential benefits of social driving behaviour by AVs on traffic safety? How do these challenges relate to the previous examples?
-
How would you classify the challenges? Technology oriented, human factors oriented, policy and evaluation oriented, and/or other types of challenges? Can you elaborate why?
References
- Aleksa, M., Schaub, A., Erdelean, I., Wittmann, S., Soteropoulos, A., & Fürdös, A. (2024). Impact analysis of Advanced Driver Assistance Systems (ADAS) regarding road safety – computing reduction potentials. European Transport Research Review, 16(1), 39. https://doi.org/10.1186/s12544-024-00654-0
- Beggiato, M., Witzlack, C., Springer, S., & Krems, J. (2018). The Right Moment for Braking as Informal Communication Signal Between Automated Vehicles and Pedestrians in Crossing Situations. Advances in Human Aspects of Transportation. https://doi.org/10.1007/978-3-319-60441-1_101
- Bin-Nun, A. Y., Derler, P., Mehdipour, N., & Tebbens, R. D. (2022). How should autonomous vehicles drive? Policy, methodological, and social considerations for designing a driver. Humanities and Social Sciences Communications, 9(1). https://doi.org/10.1057/s41599-022-01286-2
- Braun, V., & Clarke, V. (2006). Using thematic analysis in psychology. Qualitative Research in Psychology, 3(2), 77–101. https://doi.org/10.1191/1478088706qp063oa
- Brown, B., Broth, M., & Vinkhuyzen, E. (2023). The Halting problem: Video analysis of self-driving cars in traffic. Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems. https://doi.org/10.1145/3544548.3581045
- Brown, B., & Laurier, E. (2017). The Trouble with Autopilots: Assisted and Autonomous Driving on the Social Road. Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems. https://doi.org/10.1145/3025453.3025462
- Brown, B., Laurier, E., & Vinkhuyzen, E. (2022). Designing Motion: Lessons for Self-driving and Robotic Motion from Human Traffic Interaction. Proc. ACM Hum.-Comput. Interact., 7(GROUP), Article 5. https://doi.org/10.1145/3567555
- Cleij, D., De Zwart, R. B. E., De Goede, M., & Ponnambalam, C. T. (2024). Better safe than sorry; Human driving strategies and the coming of automated vehicles. https://swov.nl/nl/publicatie/better-safe-sorry
- Cohen, T., Stilgoe, J., Stares, S., Akyelken, N., Cavoli, C., Day, J., Dickinson, J., Fors, V., Hopkins, D., Lyons, G., Marres, N., Newman, J., Reardon, L., Sipe, N., Tennant, C., Wadud, Z., & Wigley, E. (2020). A constructive role for social science in the development of automated vehicles. Transportation Research Interdisciplinary Perspectives, 6, 100133. https://doi.org/10.1016/j.trip.2020.100133
- de Gelder, E., op den Camp, O., Broos, J., Paardekooper, J.-P., van Montfort, S., Kalisvaart, S., & Goossens, H. (2024). TNO StreetWise: Scenario-Based Safety Assessment of Automated Driving Systems (No. TNO 2024 R10983). https://www.tno.nl/en/newsroom/papers/scenario-based-safety-assessment/
- de Winter, J., & Dodou, D. (2022). External human–machine interfaces: Gimmick or necessity? Transportation Research Interdisciplinary Perspectives, 15, 100643. https://doi.org/10.1016/j.trip.2022.100643
- Department of Motor Vehicles (DMV). (n.d.). Disengagement Reports. https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/disengagement-reports/
- Eisele, D., & Petzoldt, T. (2022). Effects of traffic context on eHMI icon comprehension. Transportation Research Part F: Traffic Psychology and Behaviour, 85, 1–12. https://doi.org/10.1016/j.trf.2021.12.014
- Elvik, R. (2020). Can the impacts of connected and automated vehicles be predicted? Proceedings from the Annual Transport Conference at Aalborg University.
- Endsley, M. R. (1995). Toward a Theory of Situation Awareness in Dynamic Systems. Human Factors, 37(1), 32–64. https://doi.org/10.1518/001872095779049543
- Faas, S. M., Mathis, L.-A., & Baumann, M. (2020). External HMI for self-driving vehicles: Which information shall be displayed? Transportation Research Part F: Traffic Psychology and Behaviour, 68, 171–186. https://doi.org/10.1016/j.trf.2019.12.009
- Favarò, F. M., Nader, N., Eurich, S. O., Tripp, M., & Varadaraju, N. (2017). Examining accident reports involving autonomous vehicles in California. PLOS ONE, 12(9), e0184952. https://doi.org/10.1371/journal.pone.0184952
- Grahn, H., Kujala, T., Silvennoinen, J., Leppanen, A., & Saariluoma, P. (2020). Expert Drivers’ Prospective Thinking-Aloud to Enhance Automated Driving Technologies - Investigating Uncertainty and Anticipation in Traffic. Accid Anal Prev, 146, 105717. https://doi.org/10.1016/j.aap.2020.105717
- Hadfield-Hill, S., Horton, J., Kraftl, P., Balestieri, J. A. P., Vilanova, M. R. N., Dias, R. A., & Soares, P. V. (2020). Spaces of interdisciplinary in/congruity: the coming together of engineers and social scientists in planning for sustainable urban environments. International Journal of Urban Sustainable Development, 12(3), 251–266. https://doi.org/10.1080/19463138.2020.1759606
- Hoogendoorn, R., van Arerm, B., & Hoogendoom, S. (2014). Automated Driving, Traffic Flow Efficiency, and Human Factors. Transportation Research Record: Journal of the Transportation Research Board, 2422(1), 113–120. https://doi.org/10.3141/2422-13
- International Organization for Standardization (ISO). (2019). Ergonomics of human-system interaction. Part 210: Human-centred design for interactive systems (No. ISO 9241-210:2019). https://standards.iteh.ai/catalog/standards/sist/ec053ca4-2add-4e8c-9f0c-9664331ee35c/iso-9241-210-2019
- Jones, C. R., & Jones, A. R. (2016). Two Blind Mice: It Is Time for Greater Collaboration between Engineers and Social Scientists around the RDD & D of Industrial Technologies. C, 2(2). https://doi.org/10.3390/c2020016
- Knoop, V. L., Wang, M., Wilmink, I., Hoedemaeker, D. M., Maaskant, M., & Van der Meer, E.-J. (2019). Platoon of SAE Level-2 Automated Vehicles on Public Roads: Setup, Traffic Interactions, and Stability. Transportation Research Record: Journal of the Transportation Research Board, 2673(9), 311–322. https://doi.org/10.1177/0361198119845885
- Kooijman, L., Happee, R., & de Winter, J. C. F. (2019). How Do eHMIs Affect Pedestrians’ Crossing Behavior? A Study Using a Head-Mounted Display Combined with a Motion Suit. Information, 10(12), 386. https://doi.org/10.3390/info10120386
- Kumar, R. (2011). Research Methodology - A step-by-step guide for beginners (3rd ed.). SAGE Publications Ltd.
- Landolfi, N. C., & Dragan, A. D. (2018, October 1–5). Social Cohesion in Autonomous Driving. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). https://doi.org/10.1109/IROS.2018.8593682
- Lee, H.-K., Shin, S.-G., & Kwon, D.-S. (2017). Design of emergency braking algorithm for pedestrian protection based on multi-sensor fusion. International Journal of Automotive Technology, 18(6), 1067–1076. https://doi.org/10.1007/s12239-017-0104-7
- Li, T., Klavins, J., Xu, T., Zafri, N. M., & Stern, R. (2025). Identifying built environment factors influencing driver yielding behavior at unsignalized intersections: A naturalistic open-source dataset collected in Minnesota. Journal of Safety Research, 92, 331–345. https://doi.org/10.1016/j.jsr.2024.12.006
- Liu, Q., Wang, X., Wu, X., Glaser, Y., & He, L. (2021). Crash comparison of autonomous and conventional vehicles using pre-crash scenario typology. Accident Analysis & Prevention, 159, 106281. https://doi.org/10.1016/j.aap.2021.106281
- Lowe, P., Phillipson, J., & Wilkinson, K. (2013). Why social scientists should engage with natural scientists. Contemporary Social Science, 8(3), 207–222. https://doi.org/10.1080/21582041.2013.769617
- Madigan, R., Nordhoff, S., Fox, C., Ezzati Amini, R., Louw, T., Wilbrink, M., Schieben, A., & Merat, N. (2019). Understanding interactions between Automated Road Transport Systems and other road users: A video analysis. Transportation Research Part F: Traffic Psychology and Behaviour, 66, 196–213. https://doi.org/10.1016/j.trf.2019.09.006
- Markkula, G., Madigan, R., Nathanael, D., Portouli, E., Lee, Y. M., Dietrich, A., Billington, J., Schieben, A., & Merat, N. (2020). Defining interactions: a conceptual framework for understanding interactive behaviour in human and automated road traffic. Theoretical Issues in Ergonomics Science, 21(6), 728–752. https://doi.org/10.1080/1463922x.2020.1736686
- Michon, J. A. (1985). A Critical View of Driver Behavior Models: What Do We Know, What Should We Do? In L. Evans & R. C. Schwing (Eds.), Human Behavior and Traffic Safety (pp. 485–524). Springer US. https://doi.org/10.1007/978-1-4613-2173-6_19
- National Highway Traffic Safety Administration (NHTSA). (n.d.). Standing General Order on Crash Reporting. https://www.nhtsa.gov/laws-regulations/standing-general-order-crash-reporting
- NCAP, E. (2024). Assisted Driving Gradings. https://www.euroncap.com/en/ratings-rewards/assisted-driving-gradings/
- Negash, N. M., & Yang, J. (2023). Driver Behavior Modeling Toward Autonomous Vehicles: Comprehensive Review. IEEE Access, 11, 22788–22821. https://doi.org/10.1109/access.2023.3249144
- Paardekooper, J. P., Comi, M., Grappiolo, C., Snijders, R. R., Vught, W. v., & Beekelaar, R. (2021, February 8). A hybrid-AI approach for competence assessment of automated driving functions. AAAI Workshop on Artificial Intelligence Safety.
- Pendleton, S. D., Andersen, H., Du, X., Shen, X., Meghjani, M., Eng, Y. H., Rus, D., & Ang, M. H. (2017). Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines, 5(1). https://doi.org/10.3390/machines5010006
- Quante, L., Stoll, T., Baumann, M., Diera, A., Földes-Cappellotto, N., Jipp, M., & Schießl, C. (2024). Measuring and Describing Cooperation Between Road Users—Results from CoMove. In C. Stiller, M. Althoff, C. Burger, B. Deml, L. Eckstein, & F. Flemisch (Eds.), Cooperatively Interacting Vehicles: Methods and Effects of Automated Cooperation in Traffic (pp. 565–608). Springer International Publishing. https://doi.org/10.1007/978-3-031-60494-2_20
- Rahmani, S., Zhenlin, X., Calvert, S. C., & van Arem, B. (2024). Characterizing Behavioral Differences and Adaptations of Automated Vehicles and Human Drivers at Unsignalized Intersections: Insights from Waymo and Lyft Open Datasets. Submitted. https://doi.org/10.48550/arXiv.2410.12538
- Razmi Rad, S., Homem de Almeida Correia, G., & Hagenzieker, M. (2020). Pedestrians’ road crossing behaviour in front of automated vehicles: Results from a pedestrian simulation experiment using agent-based modelling. Transportation Research Part F: Traffic Psychology and Behaviour, 69, 101–119. https://doi.org/10.1016/j.trf.2020.01.014
- Riedmaier, S., Ponn, T., Ludwig, D., Schick, B., & Diermeyer, F. (2020). Survey on Scenario-Based Safety Assessment of Automated Vehicles. IEEE Access, 8, 87456–87477. https://doi.org/10.1109/ACCESS.2020.2993730
- Sánchez, M. M., Elfring, J., Silvas, E., & Molengraft, R. v. d. (2022, October 8–12). Scenario-based Evaluation of Prediction Models for Automated Vehicles. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). https://doi.org/10.1109/ITSC55140.2022.9922603
- Sarker, M. S., Carsten, O., Huang, Y., & Hajiseyedjavadi, F. (2024). Promoting pedestrian safety in Bangladesh: Identifying factors for drivers’ yielding behavior at designated crossings using behavior change theories. Traffic Injury Prevention, 25(7), 976–985. https://doi.org/10.1080/15389588.2024.2355630
- Schmitt, D. R. (1998). Social Behavior. In K. A. Lattal & M. Perone (Eds.), Handbook of Research Methods in Human Operant Behavior (pp. 471–505). Springer US. https://doi.org/10.1007/978-1-4899-1947-2_15
- Straub, E. R., & Schaefer, K. E. (2019). It takes two to Tango: Automated vehicles and human beings do the dance of driving – Four social considerations for policy. Transportation Research Part A: Policy and Practice, 122, 173–183. https://doi.org/10.1016/j.tra.2018.03.005
- Tennant, C., Neels, C., Parkhurst, G., Jones, P., Mirza, S., & Stilgoe, J. (2021). Code, Culture, and Concrete: Self-Driving Vehicles and the Rules of the Road. Frontiers in Sustainable Cities, 3. https://doi.org/10.3389/frsc.2021.710478
- Tesla. (2024). Tesla Model Y Owner’s Manual. https://www.tesla.com/ownersmanual/modely/en_us/GUID-2CB60804-9CEA-4F4B-8B04-09B991368DC5.html
- Tian, K., Tzigieras, A., Wei, C., Lee, Y. M., Holmes, C., Leonetti, M., Merat, N., Romano, R., & Markkula, G. (2023). Deceleration parameters as implicit communication signals for pedestrians’ crossing decisions and estimations of automated vehicle behaviour. Accid Anal Prev, 190, 107173. https://doi.org/10.1016/j.aap.2023.107173
- United Nations Economic Commission for Europe (UNECE). (2021). UN Regulation No 157 – Uniform provisions concerning the approval of vehicles with regards to Automated Lane Keeping Systems (No. [2021/389]). http://data.europa.eu/eli/reg/2021/389/oj
- United Nations Economic Commission for Europe (UNECE). (2022). Proposal for a second iteration of the New Assessment/Test Method for Automated Driving — Master Document (No. ECE/TRANS/WP.29/2022/57). https://unece.org/sites/default/files/2024-03/ECE_TRANS_WP.29_2022_57e.pdf
- United Nations Economic Commission for Europe (UNECE). (2025). UN Regulation No 79 – Uniform provisions concerning the approval of vehicles with regard to steering equipment (No. [2025/3]). http://data.europa.eu/eli/reg/2025/3/oj
- Villadsen, H., Lanng, D. B., & Hougaard, I. (2023). Automated shuttles and ‘negotiation in motion’ – A qualitative meta-synthesis of spatial interactions with human road users. Transport Policy, 137, 23–31. https://doi.org/10.1016/j.tranpol.2023.04.007
- Vinkhuyzen, E., & Cefkin, M. (2016). Developing Socially Acceptable Autonomous Vehicles. Ethnographic Praxis in Industry Conference Proceedings, 2016(1), 522–534. https://doi.org/10.1111/1559-8918.2016.01108
- Waymo. (n.d.-a). Waymo Open Dataset. https://waymo.com/open/
- Waymo. (n.d.-b). Waymo website. Retrieved March 2, 2023, from https://waymo.com/waymo-driver/
- Zenseact. (n.d.). Zenseact Open Dataset. https://zod.zenseact.com/
- Zhao, X., Li, X., Rakotonirainy, A., Bourgeois-Bougrine, S., Zhu, Z., & Delhomme, P. (2024). Crossing roads in a social context: How behaviors of others shape pedestrian interaction with automated vehicles. Transportation Research Part F: Traffic Psychology and Behaviour, 102, 88–106. https://doi.org/10.1016/j.trf.2024.02.008
This Is an open-access article distributed under the terms Of the Creative Commons Attribution 4.0 International License (CCBY-4.0). View this license's legal deed at https://creativecommons.org/licenses/by/4.0 and legal code at https://creativecommons.org/licenses/by/4.0/legalcode for more information.