Effects of automatic emergency braking systems to reduce risk of crash and serious injuries among pedestrians and bicyclists
Abstract
Objective
The aim of this study is to investigate the effectiveness of Automatic Emergency Braking (AEB) with detection of pedestrians and bicyclists in reducing car-to-pedestrian and car-to-bicyclists collisions and also injury mitigation in these collisions.
Methods
The study analyses collision data from the Swedish Traffic Accident Data Acquisition (STRADA) encompassing road traffic accidents reported by the police and by emergency hospitals in Sweden. Crashes occurring between the years 2012 and 2022 and with cars from model years 2012 to 2022 were included in the dataset. Two statistical analyses were performed. To evaluate the crash reduction effect of AEB, odds ratio calculations with an induced exposure approach was conducted where the outcomes of sensitive and non-sensitive crashes were studied. The sensitive crashes were hit pedestrians and bicyclists, respectively. The non-sensitive crash type in both comparisons was struck vehicles in rear-end crashes. The collision reducing effect was analysed for various speed limits, lighting and visibility conditions. To evaluate whether AEB has a reducing effect on injury severity, relative differences in injury outcomes (both proportion of MAIS3+ and risk of permanent impairment, RPMI) of pedestrians and bicyclist was compared for hitting cars with and without AEB.
Results
A total of 2 160 pedestrian collisions and 3 374 cyclist collisions were included, and the non-sensitive crashes consisted of 5 738 vehicles. The overall reduction in crash risk was approximately 20% (±10%) for vehicles equipped with AEB with pedestrian and/or bicycle detection. When analysed by lighting conditions, reductions in crash risk of just over 20% were observed in daylight for vehicles with AEB with pedestrian and/or bicycle detection. It appears to be a reduction also in darkness, although the reductions found of approximately 20% were not statistically significant. Reductions were observed for various weather conditions, except for cyclist crashes during rain, fog, and snowfall. A greater reduction in crash risk was noted on high-speed roads (60–120 km/h) for vehicles equipped with AEB for bicycle detection compared to low-speed roads (10–50 km/h). No similar difference was observed for AEB with pedestrian detection. Additionally, there was a greater reduction in crashes at intersections for vehicles with AEB for pedestrian detection and on roads for vehicles with AEB for bicycle detection. No difference in injury severity, both regarding proportion of MAIS3+ and RPMI, for both pedestrians and bicyclists was observed between collisions involving vehicles with and without AEB.
Conclusions
This study confirms the significant potential of AEB systems in improving road safety for pedestrians and cyclists. However, their current effectiveness is too low to provide sufficient protection at today’s speed limits and their expected potential and real-world performance differ a lot, which highlights the need for improvements. The study shows varying effectiveness of AEB systems in reducing crash risks under different lighting, weather, and speed conditions. Furthermore, no injury mitigating effect could be verified for cars with AEB for pedestrians and bicyclist possibly showing that either a crash was completely avoided, or the AEB system did not perform any braking. While avoiding crashes could be the prime objective for an AEB for vulnerable road users, braking that reduce injury severity despite there was a crash is of importance as well.
1. Introduction
Road safety remains a critical concern globally, with Vulnerable Road Users (VRU), such as pedestrians and bicyclists, experiencing a disproportionate share of road traffic fatalities and injuries. Despite an overall reduction in road traffic deaths, fatalities among these groups have not seen similar declines. For instance, in the European Union, 21% of all road traffic fatalities involve pedestrians, while bicyclists account for approximately 8% (ETSC, 2024; Eurostat, 2019). In Sweden, pedestrians account for 18% of all road fatalities, and bicyclists for 10%, and in terms of serious injuries with long-term consequences, pedestrians are the most frequently injured road user group, followed by bicyclists (Amin et al., 2022). These facts highlight the urgent need for effective safety measures.
The Vision Zero approach, introduced in 1995, aims to address this issue by controlling kinetic energy to remain within human biomechanical tolerance thresholds, thus reducing the severity of injuries and preventing fatalities (Tingvall & Haworth, 1999). This policy underscores the significant impact of vehicle speed on the risk of serious injury or death in crashes involving pedestrians and bicyclists (Rosén et al., 2011; Rosén & Sander, 2009). As part of this approach, maintaining lower vehicle speeds in areas where pedestrians and vehicles frequently interact is crucial (Rizzi et al., 2023), with a recommended maximum speed limit of 30 km/h in such zones (Swedish Government, 2020). To complement these speed limits, various infrastructure improvements are implemented to enhance safety. These include raised pedestrian crossings, speed bumps, road narrowing, and chicanes, all designed to manage vehicle speeds effectively (Agerholm et al., 2017; Lee et al., 2013; Pucher et al., 2010). Additionally, the Swedish Transport Administration has developed a classification system for pedestrian crossings to ensure safety standards are met, with features like speed bumps or grade separation at crossings to ensure vehicles travel at safe speeds (Swedish Transport Administration, 2016).
Beyond infrastructure, advancements in vehicle technology have also played a significant role in enhancing pedestrian safety. Autonomous Emergency Braking (AEB) systems, which automatically apply brakes when a collision with an object (vehicle, pedestrian, bicycle, etc.) is imminent, have shown promise in reducing the severity of crashes and injuries. Studies have demonstrated significant reductions in pedestrian crashes in vehicles equipped with AEB systems, though the effectiveness of these systems can vary depending on factors such as lighting conditions and vehicle speed (Cicchino, 2022; Kullgren et al., 2023). For instance, AEB systems have been associated with reductions of 13%–30% in police-reported car-to-pedestrian crashes and between 6%–36% in insurance claims depending on the crash scenario (Cicchino, 2022; Isaksson-Hellman & Lindman, 2019). By either avoiding the collision or, if avoidance is not possible, reducing the speed of the vehicle, AEB systems effectively lower the collision speed. The impact speed in collisions between cars and pedestrians or cyclists is strongly correlated with the severity of the collision; lower impact speeds significantly reduce the risk of death and serious injuries among pedestrians and cyclists (Haus et al., 2019; Lubbe et al., 2022; Lubbe & Kullgren, 2015; Rosén et al., 2011; Rosén & Sander, 2009). Predictive studies have shown that AEB with pedestrian detection reduces the risk of death by 84%–87% and the risk of serious injury (MAIS score 3+) by 83%–87% (Haus et al., 2019). When Vacuum Emergency Brake (VEB) is added to AEB, the system reduces pedestrian fatalities by 80%–87% (Jeppsson et al., 2018).
The effectiveness of AEB systems and other vehicle-based safety features can be enhanced through a combination of different measures. For example, integrating traffic calming measures, such as lower speed limits, can amplify the benefits of AEB systems by reducing travel speeds (Rizzi et al., 2023), making it easier for drivers to anticipate pedestrian actions and avoid crashes. Furthermore, evaluations of real-world crash data have shown that high scores in pedestrian protection tests, like those conducted by Euro NCAP, correlate with better safety outcomes, particularly in lower-speed zones (Ohlin et al., 2017; Strandroth et al., 2011).
Creating a holistic approach to road safety that integrates vehicle design, speed management, infrastructure improvements, and urban planning is essential. This multifaceted strategy not only aims to reduce road fatalities and injuries among VRU but also promotes sustainable and active transportation options. By enhancing the safety of pedestrians and bicyclists, we can contribute to more liveable, vibrant urban environments that support the well-being of all road users.
Whilst studies have been published describing the effect of AEB in protecting pedestrians and cyclists, there is a lack of in-depth knowledge on the crash reducing and injury mitigation effects under various conditions. Furthermore, there is a lack of knowledge regarding the injury mitigating effect of AEB for pedestrians and bicyclists. Therefore, this study aims to conduct a thorough investigation based on real collision data to see how effective AEB with pedestrian and cyclist detection is in reducing car-to-pedestrian and car-to-cyclist collisions and to see if there is a mitigating effect on injury severity.
2. Materials and methods
2.1. Accident data
The main source of data was the national accidents database Swedish Traffic Accident Data Acquisition (STRADA). The dataset consist of road traffic crashes between passenger cars and pedestrians or bicyclists in Sweden for the period 2012 and 2022, involving cars from model years 2012 to 2022. STRADA is unique in combining crash information reported by both police and emergency hospitals with at least one injury (Transportstyrelsen, 2024). Injury outcomes were obtained from emergency hospitals using the Abbreviated Injury Scale (AIS) to calculate the Maximal AIS (MAIS) and Risk of Permanent Medical Impairment (RPMI). MAIS is defined as the most severe injury when the person has multiple injuries (Decker et al., 2016) and measures the risk of death on a scale from 1 (minor) to 6 (fatal) (AAAM, 2020). RPMI estimates the risk of permanent medical disability, i.e. long-term effects, on a percentage scale (Malm et al., 2008) and is the basis for the Swedish national target for serious injuries in the road transport system (Berg et al., 2016). A medical impairment is regarded as permanent when no further improvement in physical or mental function is anticipated with additional treatment. An injury is assigned a medical impairment degree ranging from 1% to 99%. While a permanent medical impairment of at least 1% encompasses all levels of impairments, a permanent medical impairment of at least 10% results in persistent symptoms that affect a person’s activities of daily living.
2.2. AEB data
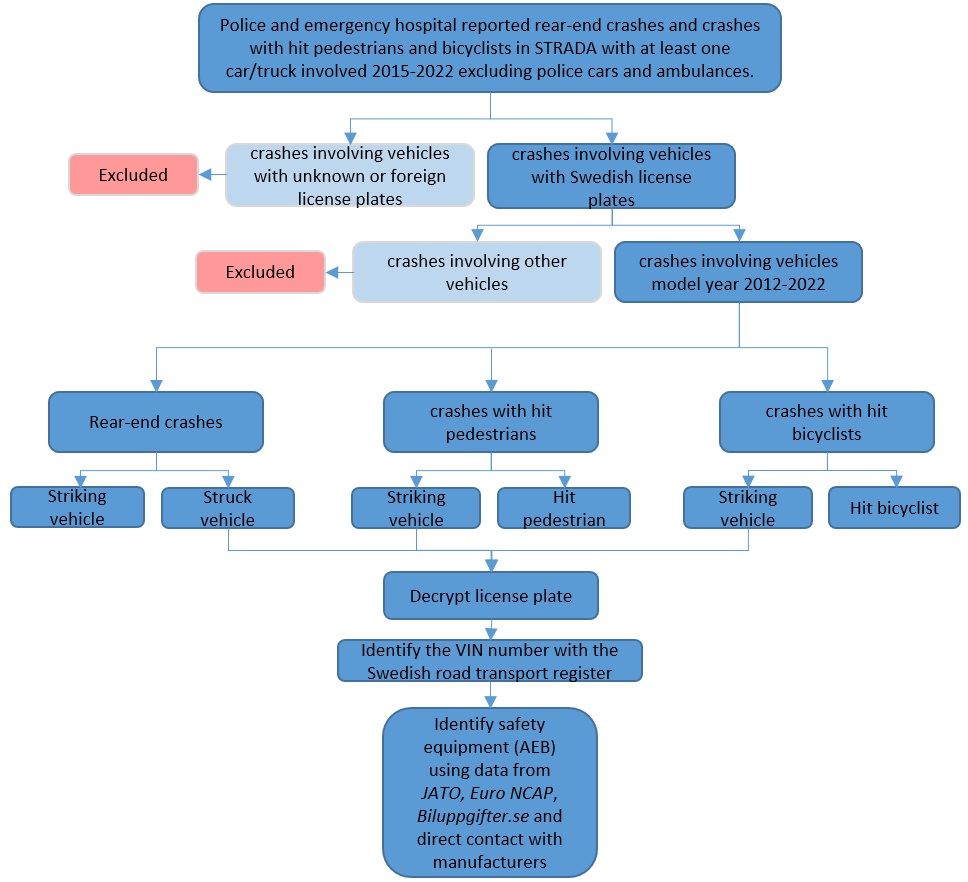
AEB with pedestrian and/or cyclist detection is standard in some car models and optional in others, depending on the model and year. To collect this information, ethical approval was obtained to access individual vehicle data, including registration numbers, from STRADA. Information such as car brand, model number, and model year was used to check the cars obtained from STRADA against Folksam’s vehicle records to determine if they have AEB as standard or optional. Cars with optional installation of these systems were verified against individual vehicle equipment lists via the website biluppgifter.se, using manufacturer codes identified through registration numbers obtained from STRADA. For more information about the evaluation process, see the flowchart illustrated in the Appendix.
2.3. Methods
2.3.1. Statistical analysis
Two methods were used for statistical analysis. To evaluate the crash reduction effect of AEB was used odds ratio calculations using an induced exposure approach to examine the outcome of susceptible and non-susceptible crashes. To evaluate whether AEB has an injury reduction effect, the relative difference in the RPMI above one percent (RPMI1%+), and ten percent (RPMI10%+) and MAIS of 3 and above (MAIS3+) between cars with and without AEB with pedestrian and/or cyclist detection was used.
2.3.2. Crash reduction effect of AEB
For this evaluation, odds ratio calculations were used using an induced exposure method that is applicable when actual exposure data are not available (Evans, 1999). The critical aspect of this approach is to identify at least one crash type where the countermeasure being analysed is reasonably assumed or known to be ineffective. In this study, sensitive crashes involved pedestrians and bicyclists being struck, while non-sensitive crashes involved vehicles with AEB with detection of pedestrians and bicyclists respectively that were struck in the rear. The reason is that the presence of AEB systems to detect VRU (AEB-VRU) in the event of a frontal collision should not affect the probability of being hit in the rear. Figure 1 provides a matrix describing the groups. One comparison was made for AEB with pedestrian detection and one for AEB with bicyclist detection. Further evaluations were carried out under different light conditions, weather conditions and speed limits.
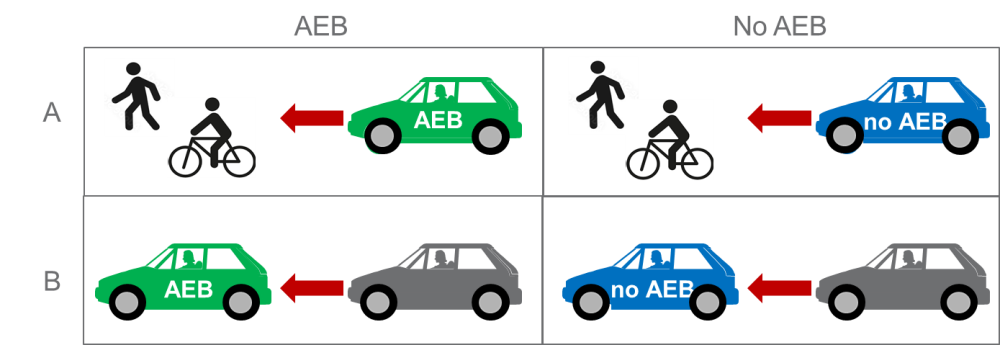
A AEB-ped = number of hit pedestrians, involving cars with AEB for pedestrians
A no AEB-ped = number of hit pedestrians, involving cars without AEB for pedestrians
B AEB-ped = number of struck cars with AEB for pedestrians in rear-end crashes
B no AEB-ped = number of struck cars without AEB for pedestrians in rear-end crashes
A AEB-bicycle = number of hit bicyclists, involving cars with AEB for bicyclists
A no AEB-bicycle = number of hit bicyclists, involving cars without AEB for bicyclists
B AEB-bicycle = number of struck cars with AEB for bicyclists in rear-end crashes
B No AEB-bicycle = number of struck cars without AEB for bicyclists in rear-end crashes.
For each equation, the effectiveness (%) in terms of crash reduction can be expressed as:
The standard deviation of each effectiveness was calculated based on a simplified odds ratio variance, according to equation (4):
where m is the number of crashes of each type. The 95% confidence limits for each effectiveness are given in equation (5).
2.3.3. Injury reduction effect of AEB
Pedestrian and cyclist injury data reported by the emergency hospitals to STRADA were used to evaluate the injury reduction effect of AEB between cars with and without AEB with pedestrian and/or cyclist detection. Three different injury measures are used for comparisons, MAIS of at least 3 (MAIS3+), the permanent medical impairment of at least 1% (RPMI1%+) and the impairment of at least 10% (RPMI10%+). RPMI is already calculated in STRADA according to the following equation (6) (see Malm et al. (2008) for a more detailed description of the method):
3. Results
3.1. Crash reduction effect of AEB
A total of 2 160 hit pedestrians and 3 374 hit bicyclists were included. The non-sensitive crashes consisted of 5 738 struck vehicles in rear-end collisions. The existence of AEB was identified in most vehicles except those noted as unknown (Table 1).
| AEB pedestrian | AEB bicycle | Injury crash reduction | |||||
| AEB fitment | n rear-end |
n pedestrian | n rear-end |
n bicycle | AEB pedestrian |
AEB bicycle |
|
| Total |
Yes | 1 361 | 438 | 786 | 379 | 19.9% (±9.7%) | 20.2% (±10.4%) |
| No | 4 206 | 1 690 | 4 898 | 2 959 | |||
| Unknown | 140 | 32 | 54 | 36 | |||
| TOTAL | 5 707 | 2 160 | 5 738 | 3 374 | |||
| Daylight |
Yes | 1 072 | 271 | 616 | 319 | 20.3% (±12.0%) | 20.4% (±11.5%) |
| No | 3 252 | 1 032 | 3 806 | 2 476 | |||
| Unknown | 108 | 19 | 35 | 25 | |||
| TOTAL | 4 432 | 1 322 | 4 457 | 2 820 | |||
| Darkness |
Yes | 283 | 166 | 167 | 60 | 16.9% (±17.9%) | 20.4% (±25.0%) |
| No | 932 | 658 | 1 068 | 482 | |||
| Unknown | 30 | 13 | 16 | 11 | |||
| TOTAL | 1 245 | 837 | 1 251 | 553 | |||
| Good visibility |
Yes | 1 078 | 331 | 627 | 305 | 17.3% (±11.6%) | 19.5% (±11.8%) |
| No | 3 242 | 1 203 | 3 782 | 2 286 | |||
| Unknown | 107 | 23 | 43 | 30 | |||
| TOTAL | 4 427 | 1 557 | 4 452 | 2 621 | |||
| Rain, fog or snow |
Yes | 211 | 64 | 114 | 41 | 34.0% (±20.6%) | 24.5% (±28.5%) |
| No | 653 | 300 | 773 | 368 | |||
| Unknown | 24 | 5 | 6 | 2 | |||
| TOTAL | 888 | 369 | 893 | 411 | |||
| Low speed 10–50 km/h |
Yes | 425 | 352 | 234 | 312 | 19.9% (±12.8%) | 18.2% (±14.8%) |
| No | 1 392 | 1 440 | 1 603 | 2 612 | |||
| Unknown | 28 | 24 | 15 | 25 | |||
| TOTAL | 1 845 | 1 816 | 1 852 | 2 949 | |||
| High speed 60–120 km/h |
Yes | 804 | 39 | 467 | 19 | 19.8% (±29.2%) | 42.5% (±27.7%) |
| No | 2 282 | 138 | 2 712 | 192 | |||
| Unknown | 101 | 6 | 31 | 3 | |||
| TOTAL | 3 187 | 183 | 3 210 | 214 | |||
| Intersections |
Yes | 320 | 111 | 184 | 247 | 33.5% (±15.9%) | 12.5% (±17.9%) |
| No | 1 050 | 548 | 1 207 | 1 852 | |||
| Unknown | 28 | 9 | 11 | 22 | |||
| TOTAL | 1 398 | 668 | 1 402 | 2 121 | |||
| Straight roads |
Yes | 981 | 276 | 572 | 102 | 11.3% (±13.5%) | 34.3% (±14.6%) |
| No | 2 954 | 937 | 3 450 | 937 | |||
| Unknown | 101 | 21 | 39 | 12 | |||
| TOTAL | 4 036 | 1 234 | 4 061 | 1 051 | |||
The overall reduction in crash risk was approximately 20% for both AEB with pedestrian detection and AEB with cyclist detection, with a similar effect observed in daylight conditions (Table 1). Contrary to previous research (Kullgren et al., 2023), our analysis indicates an effectiveness also in darkness for both AEB with pedestrian detection (17% ±18%) and AEB with cyclist detection (20% ±25%).
When looking at the weather conditions at the time of the crash, a significant reduction in crash risk was found for AEB with pedestrian or cyclist detection in good visibility (approximately 17% ±12% and 19% ±12%, respectively). Additionally, AEB with pedestrian detection showed a significant reduction in crash risk during rain, fog, and snowfall (34% ±21%), while the reduction for AEB with cyclist detection under these conditions was not significant (approximately 25% ±29%).
Regarding speed limits, the results indicate a significant reduction in crashes for cars equipped with AEB with cyclist detection at both low (10–50 km/h) and high (60–120 km/h) speeds, with a slightly greater reduction at high speeds (approximately 18% ±15% and 43% ±28%, respectively). For cars with AEB with pedestrian detection, the reduction in crashes was similar for both low and high speeds, with significant results for low speeds but not for high speeds (approximately 20% ±13% and 20% ±29%, respectively).
Furthermore, a greater reduction in crash risk was observed at intersections for cars with AEB with pedestrian detection (approximately 34% ±16%) and on straight roads for cars with AEB with cyclist detection (approximately 34% ±15%).
3.2. Injury severity reduction effect of AEB
The analysis of injury reduction using AEB with pedestrian and/or bicycle detection is based solely on crash data from emergency hospitals reported to STRADA. This is because police reports lack information about the type and severity of injuries. Out of a total of 2 160 pedestrian collisions and 3 374 cyclist collisions, 713 pedestrians and 1 269 cyclists were reported by emergency hospitals to STRADA.
Table 2, presenting the average RPMI for cars with and without AEB, shows that the average RPMI is equal for them. An estimated one fourth (28% of hit pedestrians and 22% of hit bicyclists) sustained injuries that could lead to permanent medical impairment of more than one percent. However, slightly more pedestrians than cyclists suffered injuries leading that could lead to a permanent medical impairment of at least 10% (approximately 7% compared to just over 4%).
| AEB fitment | AEB pedestrian | AEB bicycle | ||||
| n | mRPMI1% (95% CI) |
mRPMI10% (95% CI) |
n | mRPMI1% (95% CI) |
mRPMI10% (95% CI) |
|
| Yes | 138 | 0.275 (0.074) | 0.067 (0.042) | 145 | 0.222 (0.068) | 0.045 (0.034) |
| No | 562 | 0.274 (0.037) | 0.068 (0.021) | 1 111 | 0.215 (0.024) | 0.038 (0.011) |
| Unknown | 13 | 0.415 (0.268) | 0.119 (0.176) | 13 | 0.226 (0.227) | 0.055 (0.124) |
| TOTAL | 713 | 0.276 (0.033) | 0.068 (0.018) | 1 269 | 0.216 (0.023) | 0.039 (0.011) |
Regarding injuries classified in AIS levels the results show that a higher proportion of pedestrians sustain MAIS3+ injuries than cyclists (12% compared to 8%). As with RPMI, there is almost no difference in the proportion of MAIS3+ injuries for cars with AEB with pedestrian and/or bicycle detection (Table 3).
| AEB fitment | AEB pedestrian | AEB bicycle | |||||
| n | n MAIS3+ |
prop. (95% CI) |
n | n MAIS3+ |
prop. (95% CI) |
||
| Yes | 138 | 17 | 0.123 (0.055) | 145 | 9 | 0.062 (0.039) | |
| No | 562 | 67 | 0.119 (0.027) | 1 111 | 86 | 0.077 (0.016) | |
| Unknown | 13 | 3 | 0.231 (0.229) | 13 | 2 | 0.154 (0.0196) | |
| TOTAL | 713 | 87 | 0.122 (0.024) | 1 269 | 97 | 0.076 (0.015) | |
4. Discussion
AEB systems with detection of pedestrians and/or cyclists while driving are designed to warn the driver and initiate braking when necessary (Ono et al., 2016). But how effective are they in relation to their intended performance? The results of this study as well as other studies based on real-world data (Cicchino, 2022; Kullgren et al., 2023) show a large difference in effectiveness compared to studies predicting the possible benefits (Haus et al., 2019). Furthermore, the study highlights the significant role of AEB systems in reducing crash risks and mitigating injuries among pedestrians and cyclists, aligning with the global road safety concerns mentioned in the introduction. This discrepancy is notable and requires further investigation in future studies, as well as attention from the automotive industry and regulating/standardization bodies. The difference may be due to the types of crashes or vehicles used in various studies compared to those tested and forming the basis of the criteria against which AEB was developed. Other possible reasons might be that the functionality of the AEB systems does not mirror real life actions taken by the driver prior to a collision, or that the AEB systems are too conservative and are not activated when they in fact should, to avoid repeated false positive reactions. The effect of driver behaviour was not possible to include in this study, but further research could perhaps shed more light to this.
This study provides a more detailed analysis of AEB performance across various conditions, which is critical given the disproportionate share of road traffic fatalities and injuries experienced by VRU such as pedestrians and bicyclists (Amin et al., 2022; ETSC, 2024; Eurostat, 2019). One finding in our study is the performance of AEB systems under varying light conditions. While previous research suggested limited or no effectiveness of AEB in darkness (Cicchino, 2022; Kullgren et al., 2023), this study indicates that AEB systems with pedestrian and bicycle detection improve crash risk reduction in both daylight and darkness. This improvement may be attributed to advancements in sensor technology and the integration of better night vision capabilities in newer AEB systems. However, future studies are needed to confirm this.
Weather conditions could also impact the effectiveness of AEB systems. Our analysis demonstrates relatively large reductions in crash risks in good visibility conditions both for pedestrians and cyclists. Additionally, AEB systems with pedestrian detection showed crash risk reduction during adverse weather conditions such as rain, fog, and snowfall, though the reduction for cyclists in these conditions was not statistically significant.
AEB systems with pedestrian detection showed a significant one-third reduction in crash risk at intersections, highlighting the need for improved safety measures at these critical points where vehicle-pedestrian interactions are frequent. The same level of crash reduction was observed for cars with AEB systems with cyclist detection on roads instead of intersections. These findings are consistent with infrastructure improvements designed to manage vehicle speeds and increase safety, such as raised crosswalks and road narrowing (Agerholm et al., 2017; Lee et al., 2013; Pucher et al., 2010).
The findings in this study reinforce the need for a multifaceted approach to road safety that integrates vehicle design, speed management, and infrastructure improvements to reduce crash injury severity (Haus et al., 2019; Lubbe & Kullgren, 2015; Rosén et al., 2011; Rosén & Sander, 2009). AEB with detection of pedestrians or bicyclist is intended to prevent pedestrians and bicyclists from being hit by cars, and also to mitigate the injury severity in case they are hit. However, this study shows that no injury mitigating effect could be verified for cars with AEB for pedestrians and bicyclist possibly showing that either a crash was completely avoided, or the AEB system did not perform any braking. This is when a However, a previous study (Rizzi et al., 2023) has shown an injury mitigating effect of AEB. These effects were found for crashes at pedestrian crossings with low or medium safety standard and at speeds up to 50 km/h. The combination of these results and the finding of the present study show that further studies should be done, preferably together with simulation of different crash locations and situations. However, the results also underscore the importance of completely avoiding situations where pedestrians are at risk of being struck by vehicles, and at improving these systems’ ability to both prevent accidents and detect pedestrians and to reduce impact injury severity during collisions. The results could be understood to reflect that in 4/5 of the crashes, there was no action at all from the AEB system, while the action was highly effective in 1/5 of the potential crashes. This interpretation of the results could indicate what type of malfunction that is associated with AEB for VRU. The relatively low effectiveness of 20% also show that improvements of the AEB performance are essential. It is important to determine the maximum speed at which AEB systems can prevent a vehicle from hitting a vulnerable road user under various crash conditions. Additionally, it is crucial to identify and further develop the appropriate speeds and scenarios for testing these systems as the tests made for both regulations as well as consumer tests does not seem to be valid in relation to real life scenarios. More and further developed test scenarios could be added to existing test protocol, see for example (Euro NCAP, 2024). In this work input from the car industry regarding knowledge of the capabilities of existing AEB systems would be of great importance. Until systems will be improved in preventing collisions with pedestrians and bicyclists, it is important to establish maximum acceptable crash rates based on the boundary conditions of vehicles, road infrastructure and human crash tolerance to achieve close to zero road fatalities and serious injuries, this has also been proposed by Rizzi et al. (Rizzi et al., 2023).
5. Limitations and future research
While this study provides valuable insights into the effectiveness of AEB systems, certain limitations must be acknowledged. The reliance on STRADA data, which primarily includes information reported by emergency hospitals and the police, may not capture all relevant crash details, particularly those not resulting in injuries. Additionally, the study’s focus on vehicles from model years 2012 to 2022 may not fully represent the latest advancements in AEB technology. Future research should include a broader range of data sources and newer vehicle models to provide a more comprehensive evaluation of AEB effectiveness. Moreover, the study’s findings on weather conditions and high-speed scenarios suggest areas where AEB systems could be further optimized. Crash reductions were observed for cars equipped with AEB systems with cyclist detection at both low (10–50 km/h) and high (60–120 km/h) speeds, with a more pronounced reduction at higher speeds. For AEB systems with pedestrian detection, crash reductions were similar across speed ranges, with significant results at low speeds but not at high speeds. However, it was not possible (due to limited dataset) to study the effectiveness of AEB in very low speeds (speed limits up to 30 km/h), which is in the level of the maximum speed reduction of car with AEB.
Continued innovation in sensor technology, coupled with real-world testing under diverse conditions, will be crucial in enhancing the capabilities of AEB systems. Investigating the integration of AEB with other advanced driver-assistance systems (ADAS) could also provide insights into creating more holistic safety solutions. As mentioned above it is important to map up to what speed of the car the AEB systems can be able to avoid striking a pedestrian or bicyclist under various conditions, such as light, road types, etc.
6. Conclusions
In conclusion, this study shows a large difference of effectiveness between the potential of AEB with detection of pedestrians and bicyclists and their real-world performance. The results show that their effectiveness is too low to give sufficient protection for pedestrians and bicyclists with the speed limits used today and the expected and real outcome of AEB seems to be very different. The study shows that the effectiveness of AEB systems in reducing crash risks across various conditions, including different lighting, weather, and speed scenarios varies. The study also shows that no injury mitigating effect could be verified in cars with AEB for pedestrians and bicyclist, which might indicate that either a crash was completely avoided, or the AEB system did not perform any braking, which shows the importance to completely avoid hitting vulnerable road users. While AEB systems have improved in avoiding crashes, further advancements are necessary to enhance a sufficient protection for pedestrians and bicyclists. A holistic approach to road safety that integrates vehicle design, speed management, infrastructure, and urban planning is essential to achieve the Vision Zero goals for all road users.
Acknowledgements
Thanks to the Swedish Transport Agency for their unique accident database STRADA. Without its data, this study would have been impossible to conduct. Thanks also to Folksam for their already collected data on safety systems in cars, it saved a lot of time for the study.
Declaration of competing interests
The authors report no competing interests.
Declaration of generative AI use in writing
During the preparation of this work the authors used AI (ChatGPT, 3.6 free) in order to reformulate some sentences. The output was reviewed and revised by the authors who take full responsibility for the content of the publication.
Ethics statement
For the processing of the STRADA data, the study has received approval from the Swedish Transport Agency (TSV 2020-8986) and the Swedish Ethical Review Authority (2018/711-31/5).
Funding
Apart from Khabat Amin’s PhD, which is funded by the Swedish Transport Agency, there is no other funding linked to the study.
CRediT contribution statement
Khabat Amin: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Project administration, Writing—original draft, Writing—review & editing. Anders Kullgren: Conceptualization, Data curation, Formal analysis, Methodology, Writing—review & editing. Claes Tingvall: Conceptualization, Writing—review & editing.
Editorial information
Handling editor: Carmelo D'Agostino, Lund University, Sweden.
Reviewers: Mahsa Jafari, Toronto Metropolitan University, Canada; Giuseppina Pappalardo, University of Catania, Italy.
Submitted: 7 August 2024; Accepted: 28 January 2025; Published: 21 February 2025.
Giuseppina Pappalardo, University of Catania, ItalyAppendix. Flow chart for data retrieval and analysis